Computer Vision Pick-and-Place: Your Robot Arm Finds, Grasps and Moves Objects (Part 4)
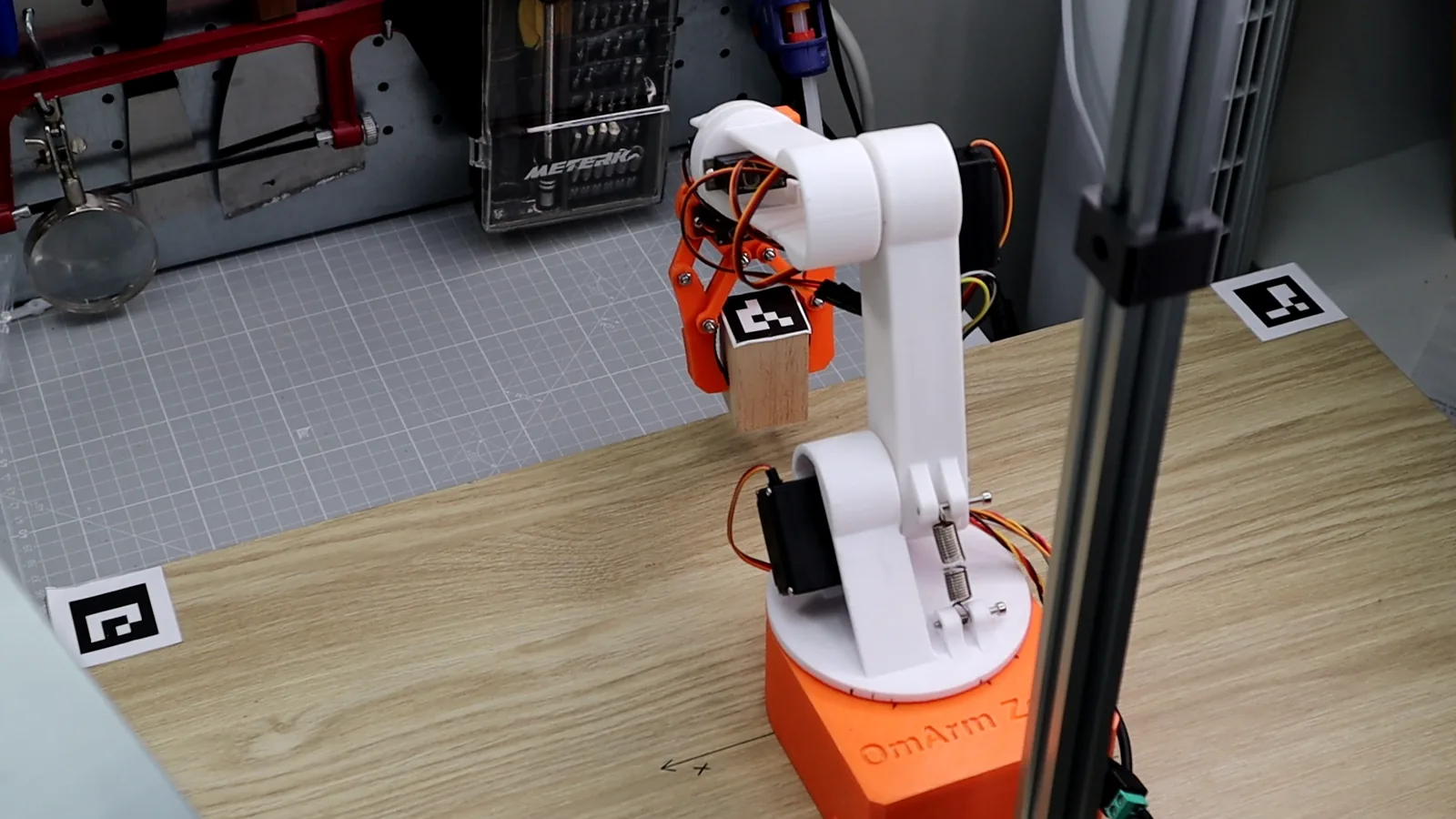
OmArm Zero Series Part 1: Build the arm and ESP32 web control · Part 2: URDF, RViz and Gazebo · Part 3: MoveIt 2 and real robot · Part 4: Computer vision pick-and-place (this post) At a glance What you’ll build: A complete vision-guided pick-and-place pipeline for the OmArm Zero. You’ll calibrate a USB camera, … اقرأ المزيد