OmArm Zero: Build a 6-DOF (5+1 Gripper) Robotic Arm with ESP32 Web Control
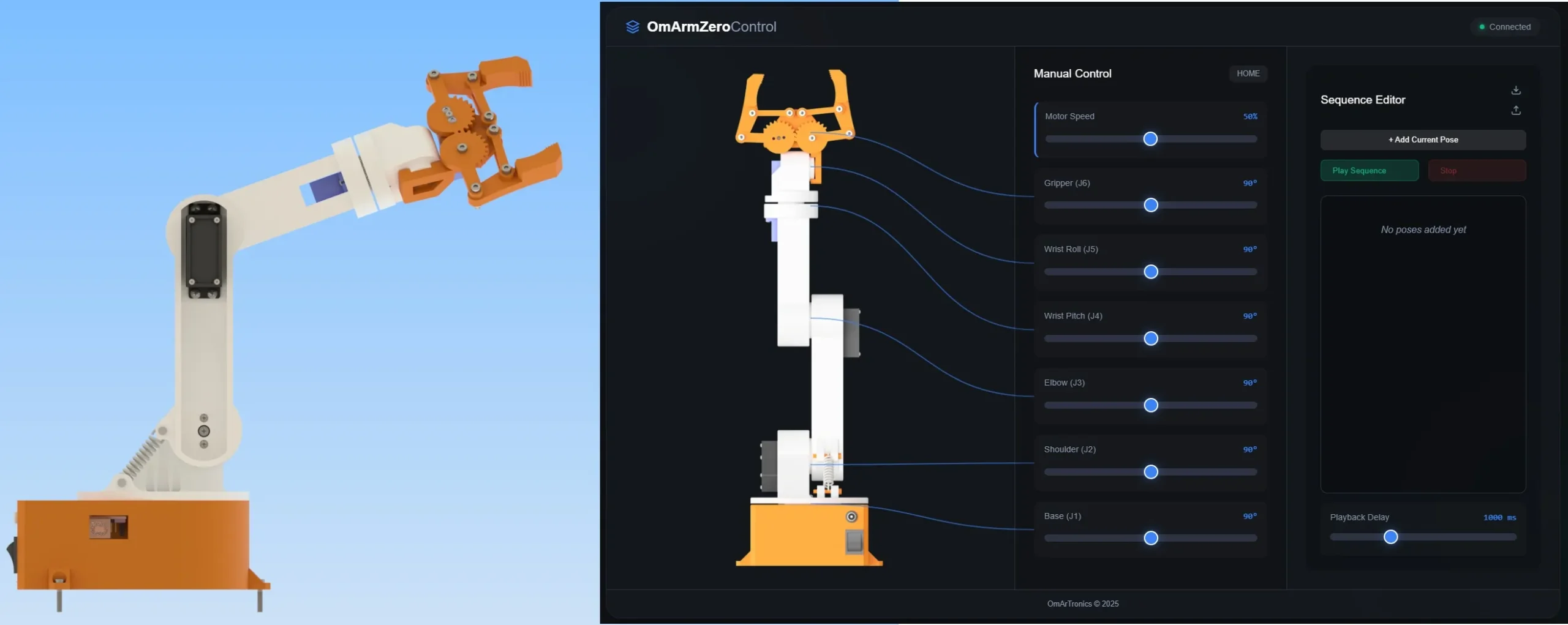
Build OmArm Zero, a 6-DOF (5+1 gripper) robotic arm with ESP32 WiFi control. Complete build guide with 3D printing files, wiring diagrams, firmware, and a browser-based control interface. 303mm reach, 150g payload, under $50.