

📋 ملخص سريع
قم ببناء ذراع آلي كامل DIY 6-DOF من الصفر باستخدام أجزاء مطبوعة ثلاثية الأبعاد، ومحركات مؤازرة MG996R وSG90، وArduino Uno، ومحرك مؤازر PCA9685. يغطي هذا الدليل خطوة بخطوة سير العمل الكامل بدءًا من تصميم CAD في Autodesk Inventor وحتى الطباعة ثلاثية الأبعاد والتجميع الميكانيكي والأسلاك الإلكترونية وبرمجة Arduino مع التحكم اليدوي القائم على مقياس الجهد.
يرشدك هذا البرنامج التعليمي خلال عملية إنشاء ملف الذراع الروبوتية ذات 6 أبعاد مختلفة من الصفر. ستقوم بتصميم كل جزء في Autodesk Inventor، وطباعتها ثلاثية الأبعاد، وتوصيل الأجهزة الإلكترونية باستخدام Arduino، وبرمجة التحكم المؤازر في الوقت الفعلي باستخدام مقاييس فرق الجهد.
يستخدم الذراع ثلاثة الماكينات ذات عزم الدوران العالي MG996R لمفاصل القاعدة والكتف والمرفق وثلاثة الماكينات الصغيرة SG90 للمعصم والقابض. إذا كنت تريد كتابًا تمهيديًا حول كيفية عمل هذه المحركات، فراجع موقعنا دليل التحكم في المحرك المؤازر. يتم التحكم في كل سيرفو في الوقت الفعلي بواسطة مقياس جهد 10 كيلو أوم خاص به، وتعمل جميع إشارات PWM الستة عبر لوحة محرك سيرفو PCA9685 على I²C. وهذا يحافظ على الأسلاك مرتبة ويحرر دبابيس Arduino للإضافات المستقبلية.
سواءً كنت هاويًا يبني أول روبوت لك أو طالب هندسة يبحث عن مشروع ميكاترونيك عمليًا، يرشدك هذا الدليل إلى كل التفاصيل مع قائمة كاملة بالمواد وإعدادات الطباعة ومخططات الأسلاك والرمز المصدري. بمجرد أن تصبح جاهزاً، يمكنك مشاهدة فيديو الإنشاء الكامل أدناه أو متابعة قراءة البرنامج التعليمي المكتوب.

نظرة عامة على المشروع
البناء له أربع مراحل: تصميم CAD, الطباعة ثلاثية الأبعاد, التجميع الميكانيكيو الأسلاك الإلكترونية مع البرمجة. يتم تصميم كل ملف STL قابل للطباعة ثلاثية الأبعاد في Autodesk Inventor مع تفاوتات دقيقة للحوامل المؤازرة ومقاعد المحامل، بحيث تتناسب الأجزاء معًا دون عمل إضافي.
على الجانب الإلكتروني، يقرأ Arduino Uno القيم التناظرية من ستة مقاييس جهد 10 كيلو أوم ويرسل أوامر I²C إلى برنامج تشغيل PWM ذو 16 قناة PCA9685، والذي يقوم بإخراج عرض النبض الصحيح لكل مؤازرة. يحافظ هذا الإعداد على فصل التيار المؤازر العالي تمامًا عن Arduino ويترك مساحة لإضافة أجهزة استشعار أو وحدات لاسلكية لاحقًا.
فاتورة المواد كاملة
قبل البدء، قم بجمع كل المكونات المدرجة في الجدول أدناه. إن وجود كل شيء في متناول اليد سيوفر عليك من التوقفات المؤقتة المحبطة في منتصف البناء.
6-أجزاء ومكونات الذراع الآلية DOF
| البند | الكمية | الجزء | الوصف |
|---|---|---|---|
| 1 | 1 | القاعدة_1 | منصة القاعدة |
| 2 | 1 | الرابط_الأساسي_الأعلى1 | قسم القاعدة العلوي |
| 3 | 1 | ذراع_لينك_1 | رابط الذراع الأول |
| 4 | 1 | ذراع_رابط_2 | رابط الذراع الثاني |
| 5 | 1 | ذراع_رابط_3 | رابط الذراع الثالث |
| 6 | 1 | قاعدة_القابض | قاعدة القابض |
| 7 | 1 | القابض_2 | إصبع القابض |
| 8 | 1 | جير_رايت | ترس القابض (يمين) |
| 9 | 1 | ترس_يسار | ترس القابض (يسار) |
| 10 | 1 | القابض | تجميع القابض |
| 11 | 4 | الرابط | أجزاء وصلة القابض |
| 12 | 2 | فاصل | فواصل مفصل القابض |
| 13 | 3 | محرك مؤازر MG996R | مضاعفات عزم الدوران العالي (القاعدة، الكتف، الكوع) |
| 14 | 3 | محرك مؤازر صغير SG90 | أجهزة صغيرة (معصم، قابض) |
| 15 | 14 | معيار ANSI B18.6.4 رقم 2-32 3/8″ | برغي رأس الجمالون، رقم 2-32 |
| 16 | 2 | معيار ANSI B18.6.4 رقم 2-32 1/4 ″ | برغي رأس الجمالون، رقم 2-32 |
| 17 | 3 | معيار DIN 7985 M1.6×2-Z | المسمار اللولبي المتقاطع M1.6 × 2 |
| 18 | 7 | ISO 4762 M3x16 (AS 1420) ISO 4762 M3x16 (AS 1420) | برغي سداسي M3×16 |
| 19 | 12 | ISO 4032 M3 (AS 1112) | صامولة سداسية M3 |
| 20 | 2 | معيار ANSI B18.6.4 رقم 2-32 1/2 ″ | برغي رأس الجمالون، رقم 2-32 |
| 21 | 3 | بوق MG955 | بوق MG996R |
| 22 | 3 | معيار DIN 7985 M3x6-Z | المسمار اللولبي المتقاطع M3×6 |
| 23 | 3 | بوق مؤازر SG90 | بوق لـ SG90 |
| 24 | 2 | معيار ANSI B18.6.4 رقم 2-32 3/8″ | برغي رأس الجمالون، رقم 2-32 |
| 25 | 12 | معيار ANSI B18.6.4 رقم 3-28 1/2″ | برغي رأس الجمالون، رقم 3-28 |
| 26 | 1 | المحمل الكروي 6806ZZZ (30 × 42 × 7) | محمل الأخدود العميق (30×42×7) |
| 27 | 1 | أردوينو أونو أو ميجا | وحدة التحكم الرئيسية |
| 28 | 1 | لوحة تشغيل المؤازر PCA9685 | مشغل PWM ذو 16 قناة (I²C) |
| 29 | 6 | مقياس جهد 10 كيلو أوم | مقبض تحكم تناظري، واحد لكل مؤازرة |
| 30 | 1 | اللوح | قاعدة الأسلاك لمقاييس الجهد |
| 31 | 1 | مصدر طاقة 5 فولت 10 أمبير | مصدر طاقة سيرفو |
| 32 | 1 | أسلاك التوصيل (ذكر-ذكر) | اتصالات اردوينو إلى PCA9685 |
| 33 | 1 | أسلاك التوصيل (ذكر-أنثى) | مقياس الجهد لاتصالات اردوينو |
| 34 | 1 | لوح خشبي | منصة تركيب الذراع |
تصميم الأجزاء ببرنامج Autodesk Inventor
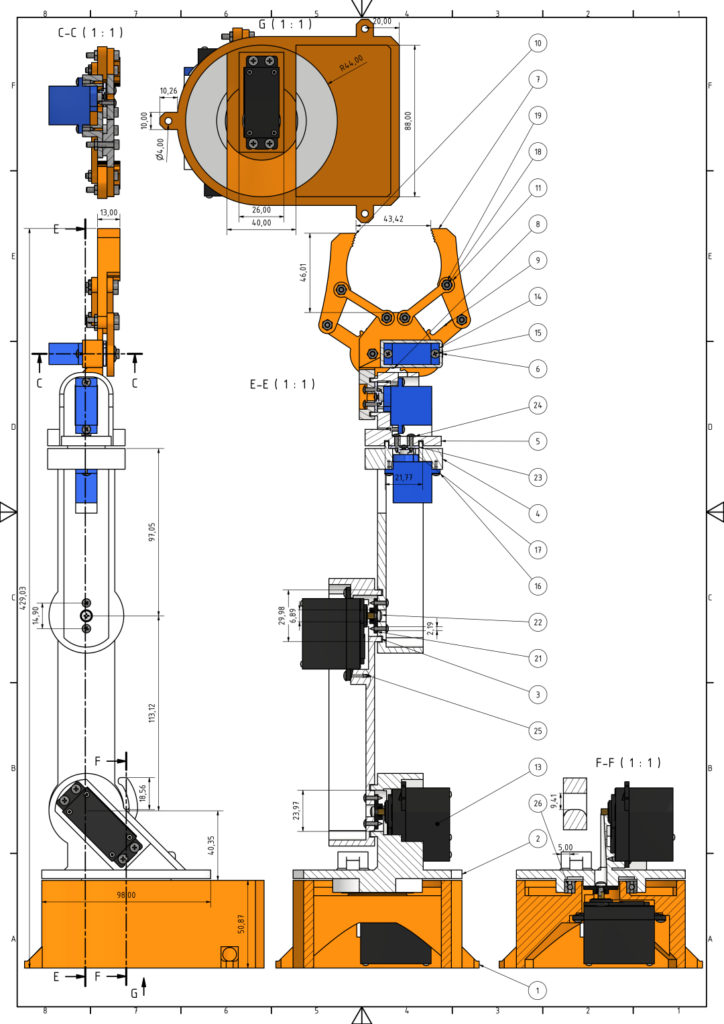
المرحلة الأولى هي نمذجة كل مكون في Autodesk Inventor. يتيح لك برنامج CAD البارامتري هذا تحديد الأبعاد الدقيقة، وحواف الشرائح من أجل القوة، والتحقق من الملاءمة قبل بثق جرام واحد من الخيوط. إذا كنت جديدًا في مجال Inventor أو الطباعة ثلاثية الأبعاد، فاطلع على موقعنا مقدمة في الطباعة ثلاثية الأبعاد والتصميم ثلاثي الأبعاد باستخدام المخترع قبل البدء.
يقود نوعان من المؤازرات قيود التصميم. النوعان الماكينات الصغيرة SG90 التعامل مع المفاصل العلوية الخفيفة والمقبض بسبب حجمها الصغير، في حين أن أجهزة الماكينات MG996R قم بتشغيل دوران القاعدة ومفاصل الكتف والمرفق الثقيلة، مما يوفر عزم الدوران اللازم لتحريك الذراع بالكامل. يوضح الرسم الفني أدناه جميع أبعاد الأجزاء وطرق العرض المقطعية وعلاقات التجميع. استخدمه كمرجع لك عند التحقق من دقة الطباعة.
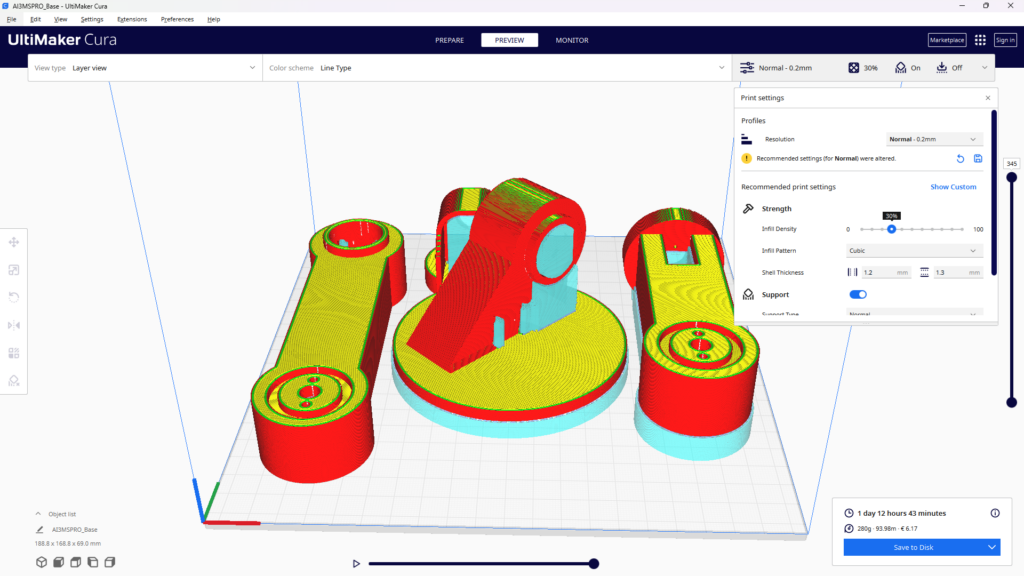
طباعة ثلاثية الأبعاد لمكونات الذراع الروبوتية 6-DOF
بمجرد تصدير ملفات STL الخاصة بك من Inventor، قم بتشغيل الطابعة ثلاثية الأبعاد. لهذا المشروع، خيوط PLA يعمل بشكل جيد لأنه يطبع بسهولة ويحمل تفاصيل دقيقة. استخدم ارتفاع الطبقة 0.2 مم وعلى الأقل 40% ردم للأجزاء الهيكلية مثل القاعدة ووصلات الذراع.
انتبه جيدًا لجيوب التثبيت المؤازرة. يجب أن تكون دقيقة الأبعاد حتى يتم ضغط المحركات بشكل مريح. بعد الطباعة، قم بإجراء بعض التنظيف الخفيف: قم بإزالة المواد الداعمة، وقم برمل الأسطح المتزاوجة، وقم باختبار كل جهاز مؤازر قبل الانتقال إلى التجميع.

تجميع ذراعك الآلي 6-DOF بنفسك
بمجرد طباعة كل جزء واختباره، يمكنك البدء في التجميع. قم بتنفيذ كل خطوة بالترتيب نظرًا لأن الذراع مبنية من القاعدة إلى الأعلى، واختبر كل مفصل للتأكد من دورانه بسلاسة قبل الانتقال إلى المفصل التالي.

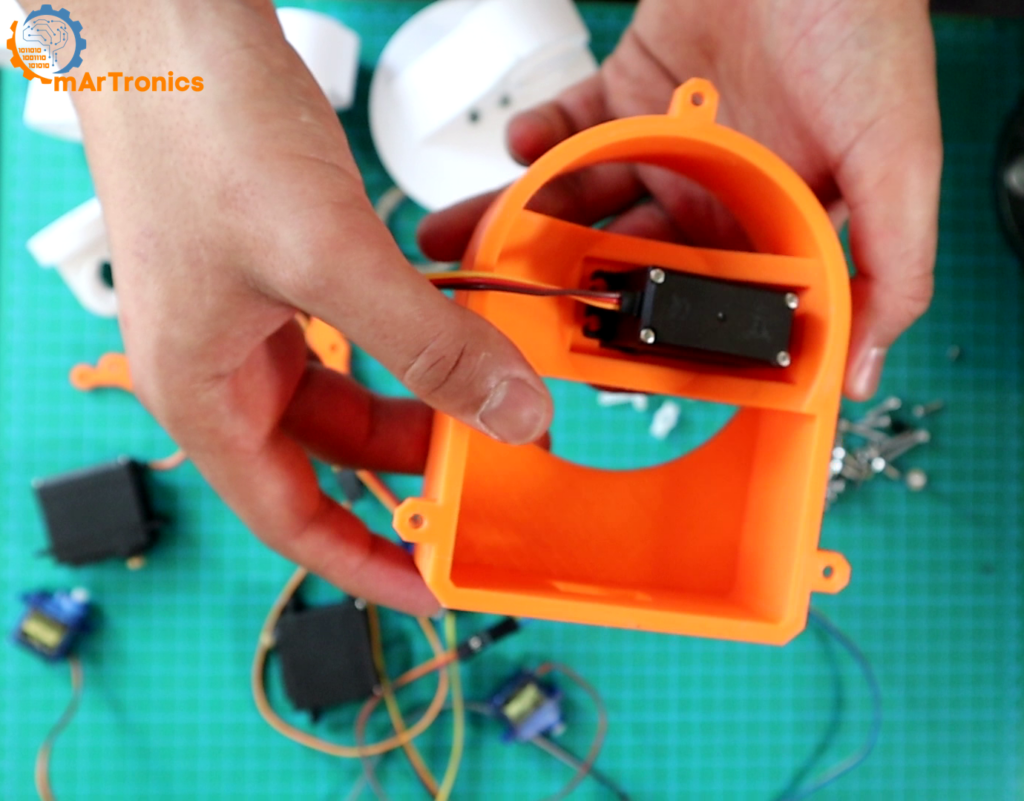
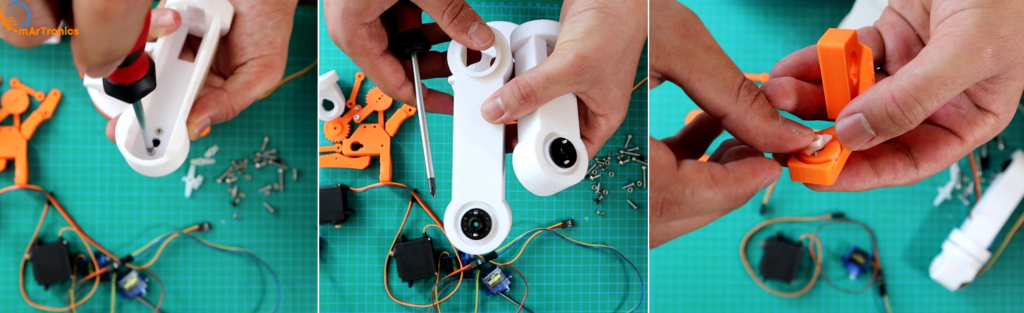
الخطوة 1: تجميع القاعدة
القاعدة هي أساس الذراع بالكامل، لذا فإن الدقة هنا مهمة جدًا.
- تأمين محرك السيرفو - قم بتركيب أول جهاز مؤازر MG996R في قاعدة التثبيت باستخدام البراغي المضمنة (أو براغي M3×12 ذاتية اللولبة ذات الرأس المتقاطع). يتعامل هذا المؤازرة مع حركة القاعدة الدورانية للذراع.
- إضافة محمل كروي (6806ZZ، 30×42×7 مم) - اضغط على محمل الكرة ذو الأخدود العميق في مقعده على القاعدة. يقع المحمل بين لوحة القاعدة الثابتة والمنصة العلوية الدوارة، مما يقلل الاحتكاك ويطيل عمر المفصل.
- توصيل بوق السيرفو - قم بتوصيل البوق المؤازر بالمنصة العلوية الدوارة باستخدام براغي M2×12 ذاتية التنصت. تأكد من أن الاتصال محكم لأن هذا البوق ينقل كل قوة الدوران من المؤازرة إلى بقية الذراع فوقه.

الخطوة 2: تركيب أبواق المؤازرة على وصلات الذراع
قم بمحاذاة كل بوق مؤازر مع نقطة ربط رابط الذراع المقابلة له، ثم قم بتثبيته باستخدام برغيين لكل بوق. تأكد من أن الثقوب تصطف بشكل مثالي. سوف يتسبب البوق غير المتوازي في حركة ملزمة وغير متساوية، لذا تحقق مرة أخرى من كل وصلة قبل ربطها بالكامل.
الخطوة 3: تركيب محركات مؤازرة لتسليح الوصلات
ضع كل محرك مؤازر في جيبه المطبوع ثلاثي الأبعاد على رابط الذراع، مع التأكد من صحة الاتجاه. قم بالربط باستخدام برغيين لكل محرك واختبر الثبات من خلال الضغط اللطيف. لا ينبغي أن يتحول المؤازرة أو يتأرجح على الإطلاق. إن حامل المحرك الصلب هو ما يمنحك حركات ذراع دقيقة ومتكررة.
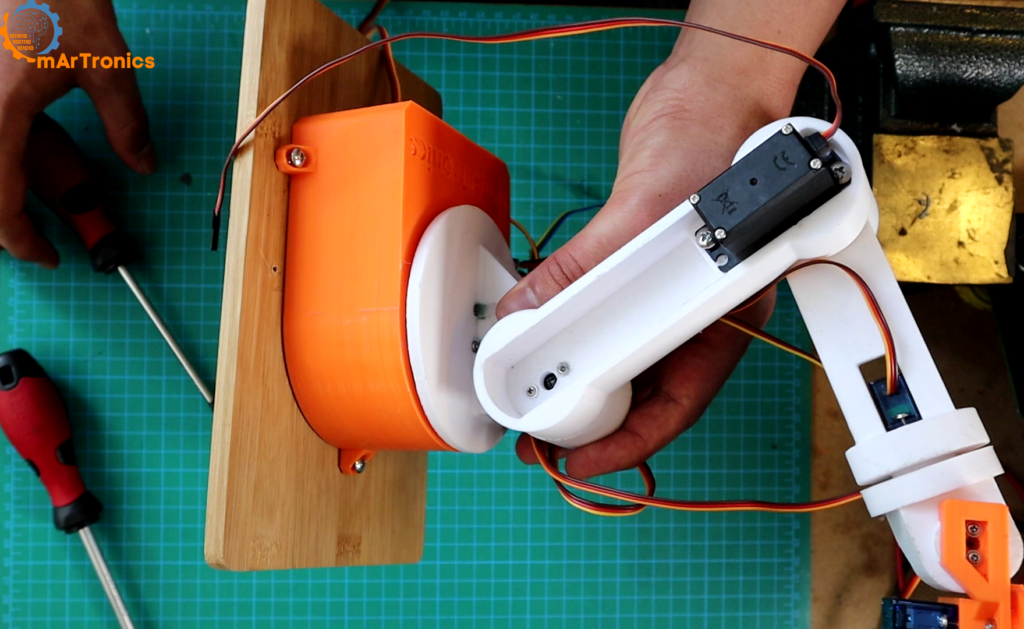
الخطوة 4: توصيل روابط الذراع
انضم الآن إلى مجموعات الارتباط والمؤازرة الفردية معًا. ضع البوق على أحد الوصلات بحيث يتم إدخاله في نقطة التعلق بالوصلة التالية، ثم ثبته بالمسامير. شد بشكل متساوٍ حتى تتحرك المفاصل بسلاسة دون أي لعب.

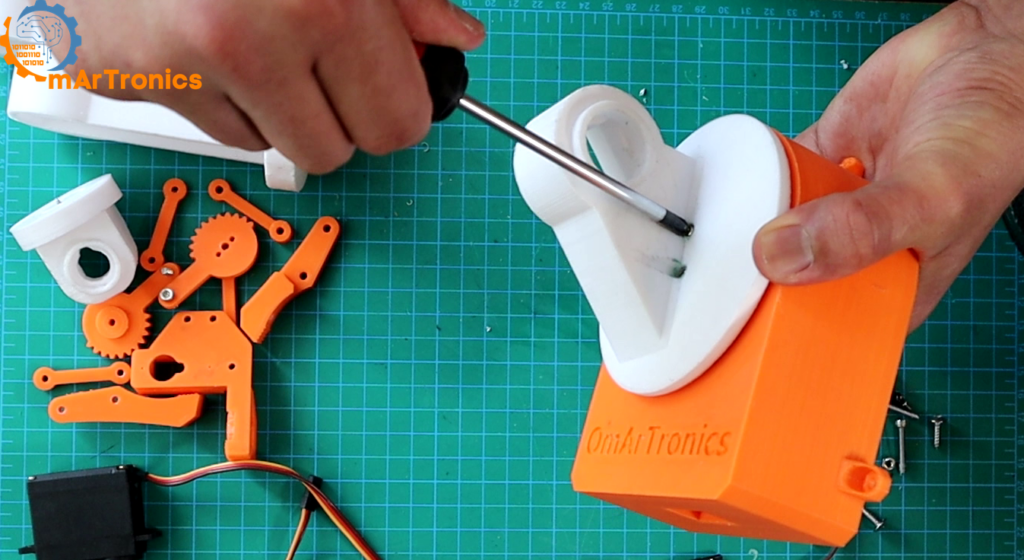
الخطوة 5: تجميع القابض
قم بتوصيل المجموعة الفرعية للمقبض بالوصلة الطرفية للذراع. يستخدم القابض أجهزة SG90 صغيرة مع زوج من التروس المطبوعة ثلاثية الأبعاد لفتح وإغلاق الأصابع. استخدم براغي M3×20 لمفاصل المقبض وتأكد من أن الأصابع تتحرك بحرية دون ربط.

الخطوة 6: تأمين الذراع على قاعدة خشبية
قم بتركيب الذراع المجمع بالكامل على لوح خشبي مسطح باستخدام براغي M3×12 ذاتية التنصت. تمنع القاعدة الصلبة الذراع من الانقلاب أثناء الحركات السريعة وتمنحك منصة لتوصيل لوحة التجارب ومصدر الطاقة لاحقًا.

توصيلات الذراع الروبوتية 6-DOF: Arduino ومحرك مؤازر
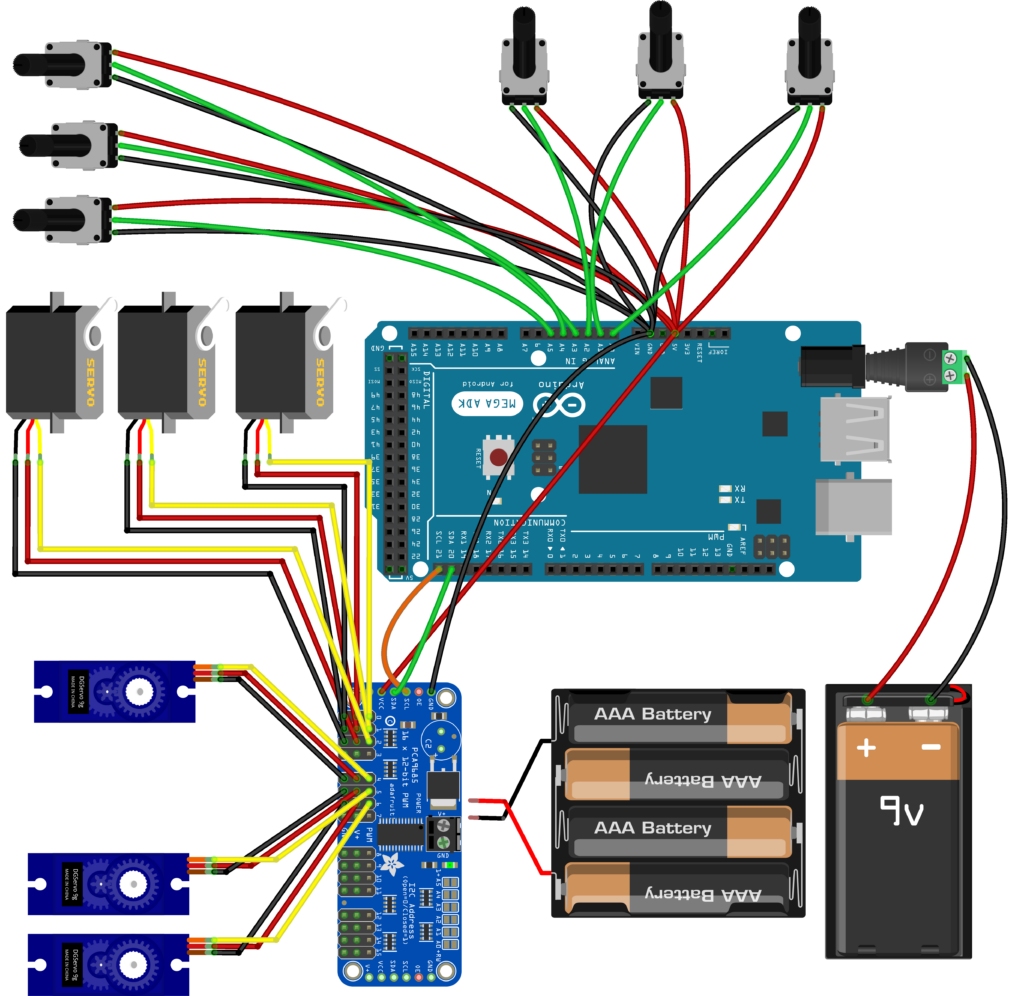
بمجرد اكتمال البناء الميكانيكي، فقد حان الوقت لتوصيل الأجهزة الإلكترونية. يتكون نظام التحكم من ثلاث قطع رئيسية: أردوينو أونو (أو ميجا) كمتحكم دقيق، فإن لوحة محرك سيرفو PCA9685 لتوليد إشارات PWM، وستة مقاييس جهد 10 كيلو أوم لإدخال المستخدم.
المكونات ودليل الأسلاك
- أردوينو أونو/ميجا - وحدة التحكم الرئيسية. يقرأ قيم مقياس الجهد ويرسل أوامر I²C إلى PCA9685.
- لوحة تشغيل المؤازر PCA9685 — مشغل PWM ذو 16 قناة يتم التحكم فيه بواسطة I²C. إنه يتعامل مع جميع الإشارات المؤازرة الستة ويترك مجالًا للتوسع.
- مزود طاقة 5 فولت 10 أمبير — يوفر طاقة مخصصة للماكينات من خلال محطة PCA9685 V+. لا تقم بتشغيل ستة أجهزة من طرف Arduino 5 V. لا يمكن توفير ما يكفي من التيار.
- 6 × 10 كيلو أوم من مقاييس الجهد 6 × 10 كيلو أوم - متصل بمنافذ Arduino التناظرية من A0 إلى A5. يؤدي تدوير المقبض إلى تغيير الجهد الكهربي، والذي يقرأه الاردوينو كقيمة من 0 إلى 1023.
- اللوح وأسلاك التوصيل - يستخدم لتنظيم توصيلات الجهد بشكل نظيف.
خطوات الأسلاك
- PCA9685 → أردوينو: قم بتوصيل VCC إلى 5 فولت، وGND إلى GND، وSDA إلى A4، وSCL إلى A5. في Mega، يستخدم SDA وSCL الأطراف 20 و21.
- الماكينات → PCA9685 قم بتوصيل موصل ثلاثي الأطراف لكل جهاز مؤازر بالقنوات من 0 إلى 5 على PCA9685. تأكد من محاذاة السلك الأرضي (البني أو الأسود) مع الصف السفلي من الرؤوس.
- مقاييس الجهد → أردوينو: قم بتوصيل الأرجل الخارجية لكل وعاء بجهد 5 فولت وGND على اللوح، ثم قم بتوصيل الدبوس الأوسط (الممسحة) بـ A0 إلى A5.
- مزود طاقة مؤازر: قم بتوصيل مصدر الإمداد 5 فولت 10 أمبير إلى طرفي لولبي PCA9685 V+ وGND. هذا يبقي تيار المؤازرة العالي منفصلًا تمامًا عن Arduino.
لماذا يحتاج الذراع الآلي 6-DOF إلى برنامج تشغيل مؤازر PCA9685
لماذا لا تقوم فقط بقيادة الماكينات مباشرة من Arduino؟ يمكنك ذلك، لكنها تصبح محدودة بسرعة. يحتوي Arduino Uno على ستة أطراف قادرة على PWM فقط، ويمكن أن تتعارض مكتبة Servo المدمجة مع ميزات أخرى تعتمد على المؤقت مثل نغمة() أو بروتوكولات اتصال معينة.
يحل PCA9685 هذه المشكلة عن طريق تفريغ كل جيل PWM إلى شريحة مخصصة. فهو يتصل عبر ناقل I²C باستخدام سلكين فقط (SDA وSCL)، بغض النظر عن عدد الماكينات التي تتحكم فيها. تتعامل لوحة واحدة مع 16 قناة، ويمكنك ربط ما يصل إلى 62 لوحة في سلسلة تعاقبية بحد أقصى نظري يبلغ 992 خدمة.
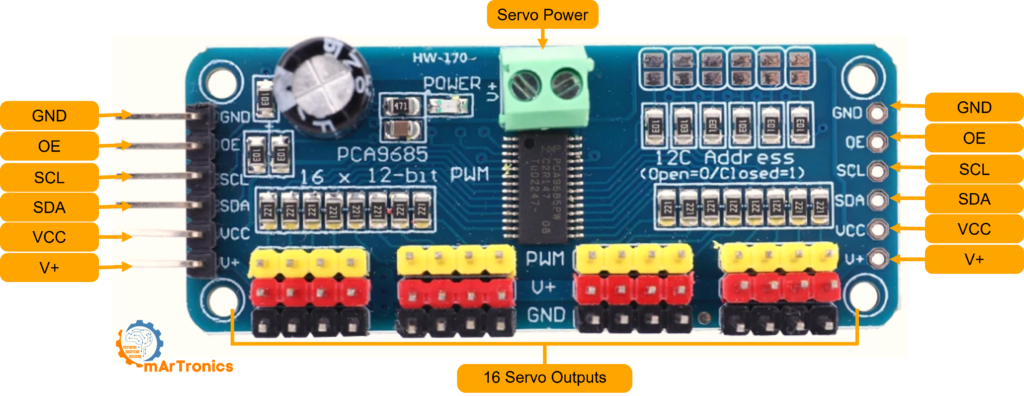
مرجع pinout PCA9685
- GND - أرضية مشتركة مشتركة مع الاردوينو.
- تمكين الإخراج (OE) — مستوى منخفض نشط بشكل افتراضي. اتركه غير متصل للحفاظ على تمكين جميع المخرجات.
- SCL — خط الساعة I²C.
- SDA - خط بيانات I²C.
- VCC - الطاقة المنطقية عند 3.3 إلى 5 فولت. وهذا يؤدي إلى تشغيل شريحة PCA9685 فقط، وليس الماكينات.
- V+ — سكة طاقة مؤازرة (حتى 6 فولت). قم بتوصيل مصدر الإمداد الخارجي الخاص بك هنا من خلال الطرف اللولبي المستقطب.
تحتوي كل قناة على اللوحة على رأس ثلاثي الأطراف يقبل موصل مؤازر قياسي مباشرةً، لذلك تكون الأسلاك سريعة ويصعب العبث بها.
برمجة الذراع الروبوتية 6-DOF للتحكم المؤازر
يربط رسم Arduino كل شيء معًا. فهو يقرأ الجهد على كل طرف تناظري، ويحوله إلى عرض نبضة مؤازرة، ويرسل النتيجة إلى PCA9685. هنا كيف يعمل المنطق.
كيف يعمل الكود
- تهيئة المكتبة - يتضمن الرسم التخطيط
Wire.hل I²C وAdafruit_PWMServoDriver.hلـ PCA9685 فيsetup()يستدعيpwm.start()ويضبط تردد PWM على 60 هرتز، وهو معدل التحديث القياسي لماكينات الهوايات. - قراءة مقاييس الجهد - في الداخل
حلقة(),analogRead(A0)من خلالanalogRead(A5)تقوم بإرجاع قيمة بين 0 و1023 بناءً على موضع المقبض. - رسم الخرائط لنبض المؤازرة - إن
map()تقوم الدالة بتحويل النطاق من 0 إلى 1023 إلى نطاق من 125 إلى 575 علامة. تمثل قيم التجزئة هذه الحد الأدنى والحد الأقصى لعرض النبض الذي يخرجه PCA9685 عند 60 هرتز (حوالي 1 مللي ثانية إلى 2.3 مللي ثانية)، والذي يتوافق مع نطاق الدوران الكامل للمؤازرة. - ضبط إخراج PWM —
pwm.setPWM(channel, 0, ticks)يرسل النبض المحسوب إلى قناة PCA9685 الصحيحة. المعلمة الثانية (0) هي علامة “تشغيل&” التكتكة، والثالثة هي علامة “إيقاف” التكتكة ضمن دورة PWM ذات 4096 خطوة. - تأخير الحلقة — يؤدي التأخير بمقدار 20 مللي ثانية في نهاية كل حلقة إلى الحفاظ على سلاسة معدل التحديث وتجنب إغراق ناقل I²C.
قم بتحميل الرسم التالي إلى Arduino Uno (أو Mega). تأكد من تثبيت مكتبة برنامج تشغيل Adafruit PWM Servo من خلال Arduino Library Manager قبل التجميع.
رسم اردوينو: كود المصدر الكامل
/**
* Author: Omar Draidrya
* Date: 2024/05/05
* Controls 6 servos via PCA9685 with potentiometer input.
*/
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(); // Default address 0x40
void setup() {
Serial.begin(9600); // Init serial for debugging
pwm.begin(); // Init PCA9685
pwm.setPWMFreq(60); // 60 Hz for servos
}
void loop() {
// Servo 0
int potValue0 = analogRead(A0); // Read A0
int servoPos0 = map(potValue0, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(0, 0, servoPos0); // Set servo 0
// Servo 1
int potValue1 = analogRead(A1); // Read A1
int servoPos1 = map(potValue1, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(1, 0, servoPos1); // Set servo 1
// Servo 2
int potValue2 = analogRead(A2); // Read A2
int servoPos2 = map(potValue2, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(2, 0, servoPos2); // Set servo 2
// Servo 3
int potValue3 = analogRead(A3); // Read A3
int servoPos3 = map(potValue3, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(3, 0, servoPos3); // Set servo 3
// Servo 4
int potValue4 = analogRead(A4); // Read A4
int servoPos4 = map(potValue4, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(4, 0, servoPos4); // Set servo 4
// Servo 5
int potValue5 = analogRead(A5); // Read A5
int servoPos5 = map(potValue5, 0, 1023, 125, 575); // Map to pulse range
pwm.setPWM(5, 0, servoPos5); // Set servo 5
delay(20); // Small delay for smooth updates
}
المكتبات المطلوبة
قبل الترجمة، قم بتثبيت هذه المكتبات من خلال Arduino IDE Library Manager: مكتبة برامج تشغيل المؤازرة PWM من Adafruit و الأسلاك (مضمنة بشكل افتراضي). ثم حدد اللوحة الخاصة بك (Arduino Uno أو Mega)، واختر منفذ COM الصحيح، وانقر فوق تحميل.
معايرة واختبار ذراعك الآلية 6-DOF
بمجرد توصيل ذراعك الآلي 6-DOF بالكامل، قم بتشغيل مصدر المؤازرة وقم بتشغيل كل مقياس الجهد ببطء. يجب أن تشاهد الحركة المشتركة المطابقة في الوقت الفعلي. إذا تحرك المفصل في الاتجاه الخاطئ، قم بتبديل الأسلاك الخارجية على مقياس الجهد هذا لعكس الاتجاه.
قم بضبط map() قيم النطاق (125 و 575) لكل سيرفو على حدة. قد تحتاج بعض الماكينات إلى قيم مختلفة قليلاً للحد الأدنى والحد الأقصى لتجنب الطنين عند توقفات النهاية الميكانيكية. اختبر الذراع تحت الحمل عن طريق التقاط الأشياء الصغيرة بالمقبض للتأكد من عزم الدوران والثبات.
ما يجب فعله بعد ذلك باستخدام ذراعك الآلية 6-DOF
لديك الآن ذراع آلية تعمل بتقنية DIY 6-DOF مبنية من الصفر. يمس هذا المشروع كل المجالات الأساسية للميكاترونكس: تصميم CAD، والتصنيع الإضافي، والأسلاك الإلكترونية، والبرمجة المدمجة.
من هنا، يمكنك إضافة حركيات عكسية لتحديد المواقع تلقائيًا، ودمج أ وحدة البلوتوث للتحكم اللاسلكي (لقد فعلنا ذلك في منطقتنا ترقية الذراع الروبوتية التي يتم التحكم فيها عن طريق البلوتوث)، أو تعليم الذراع تسجيل وإعادة تشغيل تسلسلات الحركة. تعد هذه المنصة ذات المحاور الستة نقطة انطلاق جيدة للتعمق في مجال الروبوتات والأتمتة.
تنزيل ملفات الطباعة ثلاثية الأبعاد (STL)
جميع ملفات STL القابلة للطباعة ثلاثية الأبعاد لهذا المشروع متاحة للتنزيل. يمكنك الحصول عليها من متجرنا أو تصفحها على Cults3D:
- متجر OmArTronics: قم بتنزيل ملفات المشروع من OmArTronics - احصل على حزمة المشروع الكاملة بما في ذلك ملفات STL ومخططات الأسلاك وكود المصدر التي يتم تسليمها إلى بريدك الإلكتروني.
- الطوائف3D: عرض على Cults3D - تصفح وتنزيل ملفات النماذج ثلاثية الأبعاد على Cults3D.
هل يمكنك معرفة كيفية توصيل مقياس الجهد مع لوحة الخبز
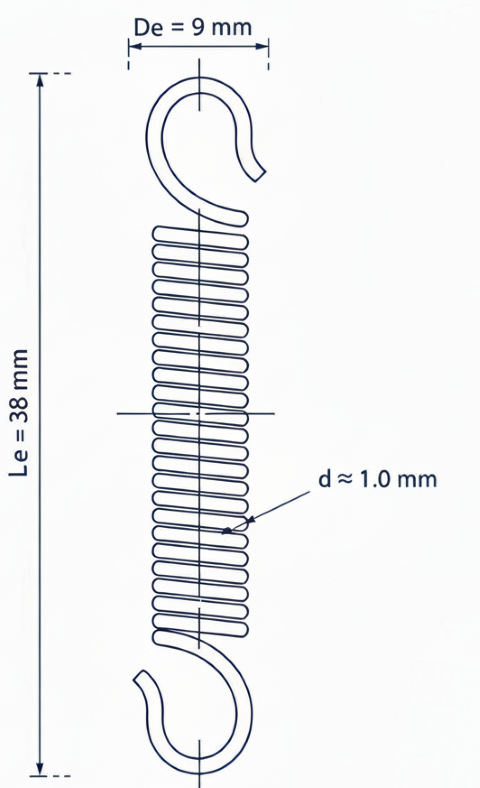
أنا أقوم ببناء روبوت ذكاء اصطناعي وأريد استخدام ذراعك الآلي في البناء. أريد تركيبه على الجانب الأمامي عموديًا. لقد لاحظت في الصور السابقة وجود زنبرك شد متصل بالقاعدة الدوارة بقطعة الذراع الأولى ولكنه غير مدرج في قائمة الأجزاء أو تعليمات البناء. أرغب في إعادة الزنبرك إلى البناء بسبب وضعه عموديًا على الروبوت الخاص بي. هل يمكنك تزويدي بمواصفات الزنبرك؟ في رأيي أن هذا الذراع الروبوتي هو أحد أفضل الأذرع المصممة والموثقة من نوعه على شبكة الإنترنت.
شكراً جزيلاً! أنا سعيد لأن التصميم أعجبك
نعم، يربط زنبرك الشد هذا القاعدة الدوارة بقطعة الذراع الأولى للمساعدة في دعم مفصل الكتف، خاصةً عندما يتم تركيب الذراع عمودياً.
يبلغ طول الزنبرك حوالي 2 سم (عند السكون) وقطره 9 مم.
في الواقع لقد قمت بإعادة استخدامها من حامل مصباح مكتبي قديم، ولكن يمكنك العثور على نوابض تمديد مماثلة بسهولة عبر الإنترنت أو في متاجر الأجهزة.
إنه اختياري ولكنه يساعد حقًا على موازنة الذراع وتقليل إجهاد المؤازرة.
مرحبًا! أردت أن أسأل عن وظيفة نقاط الربط الموجودة على القاعدة والرابط الأول، هل هي للزنبرك؟ لقد تم تصميمه ولكن صور التجميع لا تحتوي على هذه الخاصية ولا يشار إليها في المنشور. شكرا لك! هذا تصميم جميل
نعم، هذه النقاط مخصصة للزنبرك. الزنبرك اختياري - فهو يساعد مفصل الكتف على حمل جزء من وزن الذراع.
تمت إضافة هذه الميزة في إصدار لاحق من التصميم.
يمكنك أيضًا استخدام شريط مطاطي، لكنني شخصيًا أفضل الزنبرك.
يبلغ طول القطعة التي استخدمتها حوالي 2 سم (عند السكون) وقطرها 9 مم.
لقد أخذتها في الواقع من حامل مصباح مكتبي قديم، ولكن يمكنك بسهولة العثور على نوابض مماثلة على الإنترنت أو في متاجر الأجهزة.
Hi,
I got different bearings form factor (60mm) and I got two different sizes for my servomotors
2x MS24 20kg for the base and 3x MG996R for the rest of joints and the gripper.
To be simple, I want to pimp your very cool design and make it muscle to the gym 🙂
Is there a way you kindly communicate STEP files and of course, IF I publish my results I will mention as the designer of the arm
Thanks in advance
Hi Jeremy, thanks a lot, here is a new version with STEP files, build guide, and more: https://omartronics.com/product/omarm-zero-6dof-esp32-robotic-arm/