

الذراع الروبوتية 6-DOF - طباعة ثلاثية الأبعاد DIY ودليل الأسلاك والبرامج
السعر الأصلي هو: 9,90 €.0,00 €السعر الحالي هو: 0,00 €.
كل ما تحتاجه لبناء ذراع آلي 6-DOF مطبوع ثلاثي الأبعاد: ملفات STL، كود Arduino، ومخطط الأسلاك.
الوصف
6-ذراع آلية DOF – حزمة المشروع الكاملة
تمنحك هذه الحزمة كل ما تحتاجه للطباعة ثلاثية الأبعاد وبرمجة ذراع آلية مكونة من 6 DOF من الصفر. يمكنك الحصول على جميع ملفات STL وكود مصدر Arduino ومخطط الأسلاك.
يحتوي الذراع على 5 محاور دوران وقابض. يعمل على محركات سيرفو MG996R وSG90، ويتم التحكم فيها من خلال Arduino Uno و محرك سيرفو PCA9685. لقد صممت الأجزاء في Autodesk Inventor وتأكدت من طباعتها بشكل جيد على أي طابعة FDM.
كيف تعمل
يتحدث Arduino Uno إلى PCA9685 عبر I2C، والذي يمنحك 16 قناة PWM للتحكم في الماكينات بشكل مستقل. يستخدم الدوران الأساسي MG996R لعزم الدوران الإضافي، بينما تستخدم مفاصل القابض والمعصم أجهزة سيرفو صغيرة SG90 أخف وزنًا. تأتي الطاقة من مصدر منفصل بجهد 5 فولت نظرًا لأن USB وحده لا يمكنه التعامل مع السحب الحالي من ستة محركات سيرفو في وقت واحد.
تحتوي كل وصلة على دعامة خاصة بها مطبوعة ثلاثية الأبعاد ونظام تركيب. يتم ربط الأجزاء معًا باستخدام مسامير وصواميل M3 القياسية. لا الغراء، لا تعديلات. إذا انكسر شيء ما، فما عليك سوى إعادة طباعة تلك القطعة الواحدة.
نصائح الطباعة
أوصي بطبقة PLA بارتفاع 0.2 مم مع حشو بنسبة 30% على الأقل للأجزاء الهيكلية. يمكن أن تنخفض نسبة ملء الأصابع إلى 20% نظرًا لأنها لا تحمل الكثير من الحمولة. يختلف وقت الطباعة، ولكن من المتوقع أن يتراوح إجماليه من 15 إلى 20 ساعة اعتمادًا على سرعة الطابعة لديك.
لمن هذا؟
إذا كنت تبدأ باستخدام روبوتات Arduino وتريد مشروعًا عمليًا يفعل شيئًا ما، فهذا مكان جيد للبدء. تم التعليق على الكود بشكل جيد، ويظهر مخطط الأسلاك كل اتصال. لا تحتاج إلى خبرة سابقة في التحكم المؤازر أو I2C. يشرح البرنامج التعليمي كل خطوة من الطباعة إلى البرمجة.
ما هو مدرج
- ملفات STL لكل جزء مطبوع
- رسم اردوينو للتحكم في السيرفو
- مخطط الأسلاك وقائمة المكونات الكاملة
البرنامج التعليمي الكامل: DIY 6-DOF الذراع الروبوتية: دليل خطوة بخطوة
منتجات ذات صلة
-
تخفيض!

روبوت يتبع الخط مزود بمستشعرات TCS34725 وKY-033
السعر الأصلي هو: 7,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة -
تخفيض!

سيارة روبوت أوموبي بلوتوث: أردوينو، HC-05 وموتور شيلد
السعر الأصلي هو: 9,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة -
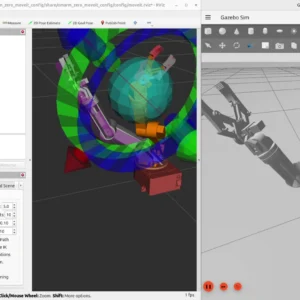
OmArm Zero: 6-DOF (5+1 Gripper) ROS 2 Robotic Arm – URDF, MoveIt 2, Computer Vision, Presentation & Tutorial Guide
0,00 € إضافة إلى السلة -
تخفيض!

رادار اردوينو DIY مع مستشعر بالموجات فوق الصوتية ومحرك مؤازر
السعر الأصلي هو: 4,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة
المراجعات
لا توجد مراجعات بعد.