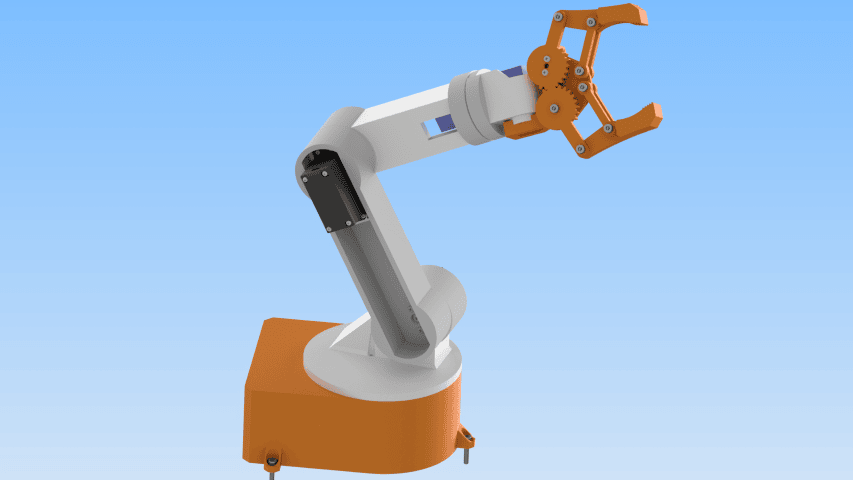
OmObiArm: بناء روبوت متحرك بذراع روبوتية مدمجة باستخدام Arduino والتحكم بالبلوتوث

قم ببناء OmObiArm، وهو ذراع روبوت متنقل يمكن التحكم فيه عن طريق البلوتوث ومدعوم من Arduino Mega وHC-05 وAdafruit Motor Shield وPCA9685 servo driver. برنامج تعليمي كامل يغطي التصميم ثلاثي الأبعاد، والتجميع، والأسلاك، وكود Arduino، وتطبيق MIT App Inventor، والمعايرة، واستكشاف الأخطاء وإصلاحها، والأسئلة الشائعة.