

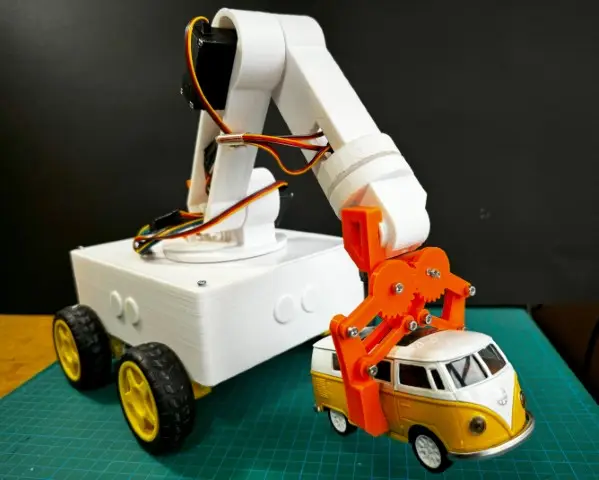
In this tutorial, we’ll learn how to build the mobile robot arm OmObiArm, a Bluetooth-controlled robot with a robotic arm, both controlled wirelessly via a custom Android app. The OmObiArm combines mobility and manipulation, allowing it to move around and interact with objects. This guide covers everything from designing, assembling the OmObiArm robot, wiring the electronics, programming the Arduino, and developing an intuitive app using MIT App Inventor.
المكونات المطلوبة:
To build the OmObiArm, you will need the following components:
- 3D-printed parts: Chassis and Arduino holder from the OmObi, and robotic arm parts from the OmArm.
- Motors and wheels: 4 DC motors with gearboxes and 4 wheels.
- Electronics: Adafruit Motor Shield V1.2, Arduino Mega, HC-05 Bluetooth Module, PCA9685 servo driver, LM2596 DC-DC Step-Down Module.
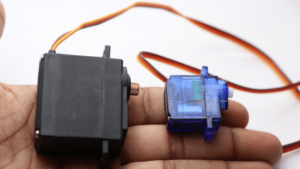
- Servos: 3 SG90 Micro Servos and 3 MG996R Servos.
- Accessories: Jumper wires, screws, Inserts, a battery, and a smartphone with the MIT App Inventor app installed.
Below is the complete Bill of Materials (BOM) listing required part along with its quantity and description.
| Item | Quantity | Part | Description |
|---|---|---|---|
|
1 |
1 |
Lower Base (Chassis) |
3D printed lower base for mounting motors and electronics |
|
2 |
1 |
JIS B 1521 – 6806 30x42x7 |
Deep groove ball bearing for base rotation
|
|
3 |
1 |
Arm Link 1 |
3D printed first arm link
|
|
4 |
1 |
Gripper Finger Right |
Right finger of the gripper, 3D printed
|
|
5 |
2 |
Gripper Sleeve |
Plastic sleeve for gripper joint axis |
|
6 |
1 |
Gripper Gear Right |
Right-side gear for gripper mechanism |
|
7 |
1 |
Gripper Gear Left |
Left-side gear for gripper mechanism |
|
8 |
1 |
Gripper Assembly |
3D printed complete gripper assembly
|
|
9 |
4 |
Link |
Generic linkage parts, 3D printed
|
|
10 |
1 |
Arm Base Upper |
3D printed upper base part of the robotic arm
|
|
11 |
3 |
SG90 Micro Servo |
Compact servo for gripper and lightweight joints
|
|
12 |
3 |
MG996R Servo |
High torque servo for base and heavy joints
|
|
13 |
1 |
Arm Link 3 |
3D printed third arm link
|
|
14 |
1 |
Arm Link 2 |
3D printed second arm link
|
|
15 |
1 |
Arm Base Link |
3D printed base for connecting the robotic arm
|
|
16 |
7 |
AS 1420 – 1973 – M3 x 16 |
Hex socket head cap screw
|
|
17 |
1 |
Extension Spring |
Spring for linkage tension
|
|
18 |
1 |
Joint Pin |
Pin used to fix joints in the robotic arm
|
|
19 |
1 |
ANSI B18.2.4.2M – M3x0.5 |
Hex nut (standard metric thread)
|
|
20 |
3 |
MG955 Horn |
Servo horns for MG996R servos
|
|
21 |
3 |
SG90 Servo Horn |
Horns for SG90 servos
|
|
22 |
8 |
ANSI B18.6.4 – No. 3 – 28 – 1/2 |
Cross Recessed Truss Head Tapping Screw – Type AB – Type I |
|
23 |
16 |
ANSI B18.6.4 – No. 2 – 32 – 3/8 |
Cross Recessed Truss Head Tapping Screw – Type AB – Type I
|
|
24
|
2 |
DIN 7985 (Z) – M3x6-Z |
Cross recessed raised cheese head screws – Type Z |
|
25 |
3 |
DIN 7985 (Z) – M2x6-Z |
Cross recessed raised cheese head screws – Type Z |
|
26 |
4 |
Motor Gear |
Plastic gear for DC motor shaft |
|
27 |
4 |
4WD Tyre |
Rubber wheel for mobile base
|
|
28 |
4 |
4WD Buggy Wheel |
Plastic wheel for 4WD platform |
|
29 |
1 |
Chassis Frame |
3D printed chassis frame for structural support |
|
30 |
3 |
Cover |
3D printed cover |
|
31 |
1 |
Robot_Car_Base |
3D printed base |
|
32 |
1 |
Arduino Mega 2560 |
Microcontroller unit for control and communication
|
|
33 |
1 |
Lower Base (Chassis) |
3D printed lower base for mounting motors and electronics |
|
34 |
1 |
L293D Motor Driver |
Dual H-bridge driver for DC motors |
|
35 |
1 |
Battery |
7.4V LiPo battery for power supply |
|
36 |
1 |
Gripper Sleeve |
Plastic sleeve for gripper joint axis |
|
37 |
16 |
Inserts |
M3 Inserts |
|
38 |
1 |
مفتاح كهربائي |
Power on/off switch for main circuit |
|
39 |
16 |
AS 1420 – 1973 – M3 x 6 |
ISO metric hexagon socket head cap screws |
|
40 |
4 |
ANSI B18.3.1M – M3x0.5 x 30 |
Broached Socket Head Cap Screw – Metric |
|
41 |
4 |
ANSI B18.3.1M – M3x0.5 x 25 |
Broached Socket Head Cap Screw – Metric |
|
42 |
1 |
وحدة البلوتوث HC-05 |
Wireless communication module for Bluetooth control |
|
43 |
4 |
ANSI B18.6.4 – No. 0 – 48 – 1/4 |
Cross Recessed Truss Head Tapping Screw – Type AB – Type I |
|
44 |
1 |
LM2596 Buck Converter |
DC-DC converter to step down voltage to 6V |
|
45 |
1 |
PCA9685 Servo Driver |
I2C-based servo driver board (up to 16 channels) |
Step 1: OmObiArm 3D Model Design for the Mobile Robot Arm
The first step in this project is combining designs from the previous OmObi and OmArm projects. Using Autodesk Inventor, we modified the base of the OmArm and merged it with the top plate (lid) design from the OmObi to create a platform that securely mounts the robotic arm onto the mobile chassis. This integration ensures that the OmObiArm is both functional and stable.
You can download the STL files for 3D printing from Cults3D.
To ensure smooth assembly and functionality, all components were designed with detailed dimensions, which are visualized in the technical drawing below. This drawing includes sectional views, providing a clear overview of the mechanical design and assembly layout.
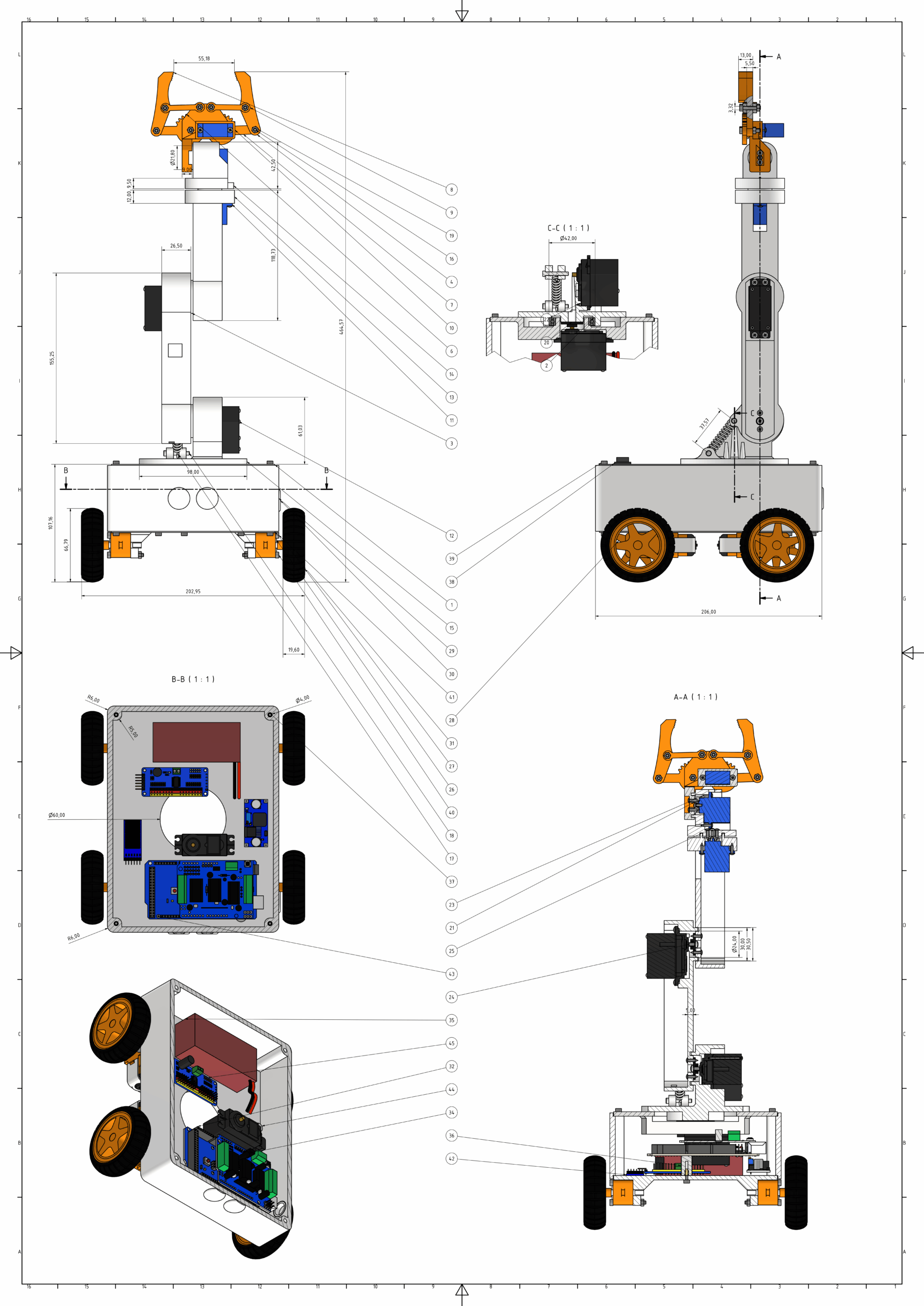
Step 2: 3D Printing the Robotic Parts
After finalizing the design, we moved on to 3D printing the components. Using a 3D printer like the Creality Ender 3, we printed all the parts for the robotic arm and the mobile platform. The designs were carefully optimized for easy assembly and robustness, forming the foundation of a stable and reliable OmObiArm platform.
Step 3: Assembling the Robot
1. Mounting the Motors and Wheels
Attach the Motors
Secure the DC motors to the 3D-printed motor mounts using screws inserts and nuts. Make sure they are firmly attached to prevent any misalignment during movement.
Mount the Wheels
Attach the wheels to the motor shafts and ensure they are tightly fixed. Test for smooth rotation and proper alignment.
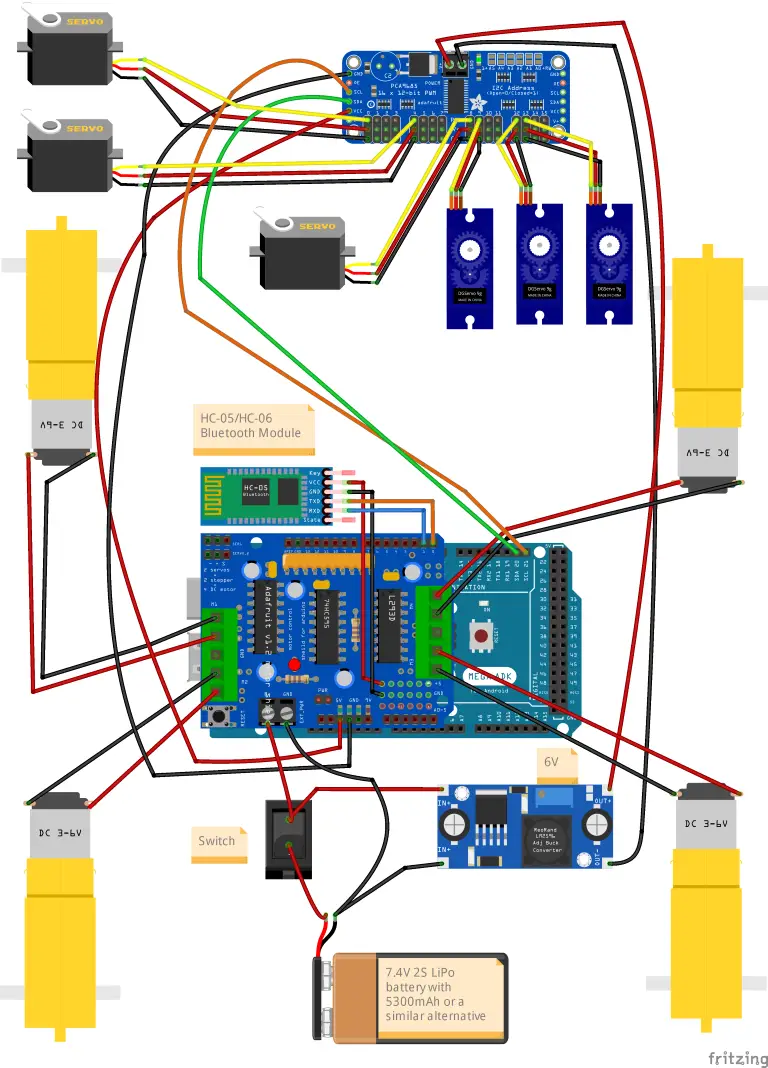
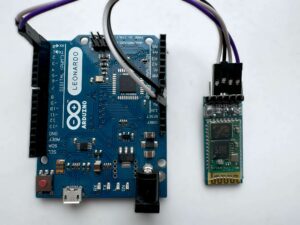
2. Mounting the Arduino, Motor Shield, PCA9685, LM2596 step-down converter and HC-05 Bluetooth Module
Attach the Arduino Holder
Secure the 3D-printed Arduino holder to the mobile chassis using screws.
Mount the Arduino and Motor Shield
Place the Arduino Uno in the holder and secure it with screws.
Attach the Adafruit Motor Shield on top of the Arduino Uno, ensuring all pins are correctly aligned and connected.
Fix the PCA9685, LM2596 step-down converter and HC-05 Bluetooth Module
Use zip ties or double-sided tape to fix the PCA9685 servo driver, LM2596 step-down converter and the HC-05 Bluetooth module onto the chassis.
3. Fixing the Top Plate and Robotic Arm Base
Attach the top plate, which serves as the robotic arm base, onto the moving platform. Use screws to secure it firmly. This provides a stable foundation for the robotic arm.
4. Assembling the Robotic Arm
Step 1: Securing the Servo Motor on the Base
Install the first servo motor onto the robotic arm’s base using M3x12 screws.
Add a 6806ZZ ball bearing (30x42x7mm) to reduce friction and enhance smooth rotation.
Attach the servo horn to the rotating upper part and secure it with M2x12 screws. Ensure the connection is tight and aligned.
Step 2: Mounting Servo Horns to Robot Arm Links
Align the servo horns with the arm links’ attachment points. Secure them with screws, tightening them firmly to prevent slippage.
Step 3: Mounting Servo Motors to Arm Links
Align the servo motors with the mounting points on the arm links. Secure them using screws, ensuring a tight and stable fit. Test the stability by gently moving the links.
Step 4: Connecting the Arm Links
Align the links and connect them using screws through the servo horns. Double-check that the joints move smoothly and are securely fastened.
الخطوة 5: تجميع القابض
Attach the gripper to the end link of the robotic arm using M3x20 screws. Verify that the gripper operates smoothly and integrates seamlessly with the rest of the arm.
5. Final Checks
الخطوة 4: توصيل المكونات
1. Connecting the Motors to the Motor Shield
- Attach the left motors to the terminals labeled M1 and M2 on the Adafruit Motor Shield.
- Attach the right motors to the terminals labeled M3 and M4.
2. Powering the System with a 7.4V 2S LiPo Battery
- Use a 7.4V 2S LiPo battery with 5300mAh capacity and an EC3 connector.
- Solder a compatible EC3 plug to the input of the circuit.
- Add a switch between the battery and the circuit to easily control power flow.
3. Using the LM2596 DC-DC Step-Down Converter
- Connect the battery in parallel to the LM2596 step-down converter.
- Adjust the potentiometer on the converter to step down the voltage to 6V, which will power the PCA9685 servo driver board.
- Ensure the output is connected to the VCC and GND terminals on the PCA9685 board.
4. Powering the PCA9685 and Servos
- It’s critical to use this independent power source (6V from the LM2596) to avoid overloading the Arduino’s onboard regulator.
- Connect each servo to the PCA9685 servo driver board, ensuring proper alignment of the signal, VCC, and GND pins.
6. Connecting the HC-05 Bluetooth Module
- VCC to 5V on the Arduino Mega.
- GND to GND on the Arduino Mega.
- TXD to RX (Pin 0) on the Arduino Mega.
- RXD to TX (Pin 1) on the Arduino Mega.
6. Connecting the Adafruit Motor Shield to the Arduino
- Place the Motor Shield securely onto the Arduino Mega, ensuring all pins are aligned and seated correctly.
7. Testing the Power Distribution
- Verify all power connections, ensuring there is no short circuit.
- Check that the motors, servos, and HC-05 module are receiving the correct voltage as per their requirements.
Following these steps ensures that the robot is wired safely and efficiently, ready for programming and operation.
Step 5: Programming the Mobile Robot Arm OmObiArm for Bluetooth Control
In this step, we program the Arduino to control the robotic arm and the mobile platform via Bluetooth. The code is divided into logical sections for better understanding. Below, each block of code is explained briefly:
/**
* Author: Omar Draidrya
* Date: 2024/11/23
* This code controls a Bluetooth robot with an integrated robotic arm.
*/
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#include <AFMotor.h>
// Constants and definitions
const int numServos = 6; // Number of servos
const int maxConfigurations = 10; // Maximum number of storable poses
const int stepDelay = 10; // Delay between each step to slow down the servo movement
const int stepSize = 1; // The number of degrees to move per step
// Servo channels on the PCA9685
const int servoChannels[numServos] = {0, 4, 8, 9, 12, 13};
// Storage structures
int savedConfigurations[maxConfigurations][numServos];
int currentServoPositions[numServos] = {375, 375, 375, 375, 375, 375}; // Default positions
int configCount = 0; // Counter for stored poses
bool isPlaying = false; // Status indicating if poses are being played
bool loopPlayback = false; // Status indicating if poses should be played in a loop
bool stopPlaying = false; // Status indicating if playback should be stopped
int currentPoseIndex = 0; // Index of the current pose during playback
// Motor instances for the rover
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
String input = ""; // Holds incoming Bluetooth data
void setup() {
Serial.begin(9600); // Serial communication for Bluetooth
// Initialize motors
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
// Initialize servo controller
pwm.begin();
pwm.setPWMFreq(50); // Set frequency to 50 Hz for servos
// Initialize servo positions
for (int i = 0; i < numServos; i++) {
pwm.setPWM(servoChannels[i], 0, currentServoPositions[i]);
}
Serial.println("Bluetooth Robot Controller ready. Waiting for commands...");
}
void loop() {
// Process incoming commands
if (Serial.available()) {
input = Serial.readStringUntil('\n'); // Read data from Bluetooth
input.trim();
Serial.println("Received command: " + input);
processCommand(input);
}
// Check if robot arm is playing poses
if (isPlaying && !stopPlaying) {
if (loopPlayback) {
playPosesInLoop();
} else {
playNextPose();
}
}
}
void processCommand(String command) {
// If playing, ignore all rover commands
if (isPlaying) {
if (command == "s") { // Allow stop playback command
stopPlayingPoses();
} else {
Serial.println("Playback in progress. Ignoring command: " + command);
}
return;
}
// Control rover movement
if (command == "F") {
forward();
} else if (command == "B") {
backward();
} else if (command == "L") {
turnLeft();
} else if (command == "R") {
turnRight();
} else if (command == "S") {
stopMotors(); // Stop motors immediately on "S" command
// Control robotic arm
} else if (command.startsWith("1,")) {
processServoCommand(command, 0); // Control Servo 1
} else if (command.startsWith("2,")) {
processServoCommand(command, 1); // Control Servo 2
} else if (command.startsWith("3,")) {
processServoCommand(command, 2); // Control Servo 3
} else if (command.startsWith("4,")) {
processServoCommand(command, 3); // Control Servo 4
} else if (command.startsWith("5,")) {
processServoCommand(command, 4); // Control Servo 5
} else if (command.startsWith("6,")) {
processServoCommand(command, 5); // Control Servo 6
// Save, play, reset poses
} else if (command == "v") {
saveCurrentPose();
} else if (command == "l") {
startPlayingPoses();
} else if (command == "r") {
resetPoses();
} else if (command == "s") {
stopPlayingPoses();
} else if (command == "o") {
loopPlayback = true;
Serial.println("Loop playback enabled.");
} else if (command == "f") {
loopPlayback = false;
Serial.println("Loop playback disabled.");
} else {
Serial.println("Unknown command: " + command);
}
}
void processServoCommand(String command, int servoIndex) {
int commaIndex = command.indexOf(',');
if (commaIndex > 0) {
int position = command.substring(commaIndex + 1).toInt();
int pwmValue = map(position, 0, 180, 150, 600);
moveToPositionSmoothly(servoIndex, pwmValue);
}
}
// Rover motor control
void forward() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
Serial.println("Moving forward");
}
void backward() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
Serial.println("Moving backward");
}
void turnLeft() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
Serial.println("Turning left");
}
void turnRight() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
Serial.println("Turning right");
}
void stopMotors() {
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
Serial.println("Motors stopped");
}
// Arm servo control
void moveToPositionSmoothly(int servoIndex, int targetPwmValue) {
int currentPwmValue = currentServoPositions[servoIndex];
if (targetPwmValue > currentPwmValue) {
for (int pos = currentPwmValue; pos <= targetPwmValue; pos += stepSize) {
pwm.setPWM(servoChannels[servoIndex], 0, pos);
delay(stepDelay);
}
} else {
for (int pos = currentPwmValue; pos >= targetPwmValue; pos -= stepSize) {
pwm.setPWM(servoChannels[servoIndex], 0, pos);
delay(stepDelay);
}
}
currentServoPositions[servoIndex] = targetPwmValue;
Serial.println("Servo " + String(servoIndex + 1) + " set to position: " + String(targetPwmValue));
}
// Pose handling for the arm
void saveCurrentPose() {
if (configCount < maxConfigurations) {
for (int i = 0; i < numServos; i++) {
savedConfigurations[configCount][i] = currentServoPositions[i];
}
configCount++;
Serial.println("Pose saved. Total poses: " + String(configCount));
} else {
Serial.println("Memory full. Cannot save pose.");
}
}
void startPlayingPoses() {
if (configCount > 0) {
stopMotors(); // Ensure rover is stopped during playback
isPlaying = true;
stopPlaying = false;
currentPoseIndex = 0;
Serial.println("Starting pose playback");
} else {
Serial.println("No poses saved");
}
}
void playNextPose() {
if (currentPoseIndex < configCount) {
for (int i = 0; i < numServos; i++) {
moveToPositionSmoothly(i, savedConfigurations[currentPoseIndex][i]);
}
delay(1000);
currentPoseIndex++;
} else {
isPlaying = false;
Serial.println("Pose playback finished");
}
}
void playPosesInLoop() {
for (int i = 0; i < configCount; i++) {
if (stopPlaying) break; // Immediate stop on command
for (int j = 0; j < numServos; j++) {
moveToPositionSmoothly(j, savedConfigurations[i][j]);
}
delay(1000);
}
}
void stopPlayingPoses() {
stopPlaying = true;
isPlaying = false;
Serial.println("Pose playback stopped");
}
void resetPoses() {
configCount = 0;
isPlaying = false;
loopPlayback = false;
currentPoseIndex = 0;
Serial.println("All poses reset");
}
1. Including Libraries and Defining Constants
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#include <AFMotor.h>
- The required libraries for servo and motor control are included.
Wire.his used for I2C communication with the PCA9685 servo driver.Adafruit_PWMServoDrivercontrols the servos connected to the PCA9685.AFMotoris used for controlling the motors via the Adafruit Motor Shield.
2. Declaring Variables
const int numServos = 6;
const int maxConfigurations = 10;
const int stepDelay = 10;
const int stepSize = 1;
const int servoChannels[numServos] = {0, 4, 8, 9, 12, 13};
int savedConfigurations[maxConfigurations][numServos];
int currentServoPositions[numServos] = {375, 375, 375, 375, 375, 375};
int configCount = 0;
bool isPlaying = false;
bool loopPlayback = false;
bool stopPlaying = false;
int currentPoseIndex = 0;
- The constants define the number of servos, maximum pose configurations, and movement parameters.
- Arrays store servo positions and saved configurations.
- Flags like
isPlayingandloopPlaybackhelp manage the robot’s state.
3. Initializing Motors and Servo Driver
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
- Motors are assigned to specific channels on the motor shield.
- The
Adafruit_PWMServoDriverobject is initialized to control servos.
4. Setup Function
void setup() {
Serial.begin(9600);
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
pwm.begin();
pwm.setPWMFreq(50);
for (int i = 0; i < numServos; i++) {
pwm.setPWM(servoChannels[i], 0, currentServoPositions[i]);
}
Serial.println("Bluetooth Robot Controller ready. Waiting for commands...");
}
- Serial communication is initialized for Bluetooth data transfer.
- Motors and servo positions are configured for initial operation.
5. Loop Function
void loop() {
if (Serial.available()) {
input = Serial.readStringUntil('\n');
input.trim();
processCommand(input);
}
if (isPlaying && !stopPlaying) {
if (loopPlayback) {
playPosesInLoop();
} else {
playNextPose();
}
}
}
- Listens for incoming commands via Bluetooth.
- Processes commands to control either the robot’s movement or arm poses.
- Manages playback of stored poses if activated.
6. معالجة الأوامر
void processCommand(String command) {
if (isPlaying) {
if (command == "s") {
stopPlayingPoses();
}
return;
}
if (command == "F") forward();
else if (command == "B") backward();
else if (command == "L") turnLeft();
else if (command == "R") turnRight();
else if (command == "S") stopMotors();
else if (command.startsWith("1,")) processServoCommand(command, 0);
else if (command.startsWith("2,")) processServoCommand(command, 1);
// Additional commands for saving, playing, and resetting poses
}
- The robot’s movement (forward, backward, left, right, stop) and arm controls are mapped to Bluetooth commands.
- Arm movements are controlled by sending specific servo positions.
- Poses can be saved, played, or reset via commands.
7. Motor Control
void forward() { motor1.run(FORWARD); motor2.run(FORWARD); motor3.run(FORWARD); motor4.run(FORWARD); }
void backward() { motor1.run(BACKWARD); motor2.run(BACKWARD); motor3.run(BACKWARD); motor4.run(BACKWARD); }
void turnLeft() { motor1.run(BACKWARD); motor2.run(BACKWARD); motor3.run(FORWARD); motor4.run(FORWARD); }
void turnRight() { motor1.run(FORWARD); motor2.run(FORWARD); motor3.run(BACKWARD); motor4.run(BACKWARD); }
void stopMotors() { motor1.run(RELEASE); motor2.run(RELEASE); motor3.run(RELEASE); motor4.run(RELEASE); }
- Functions to control the direction and speed of the DC motors.
8. Servo Control
void moveToPositionSmoothly(int servoIndex, int targetPwmValue) {
int currentPwmValue = currentServoPositions[servoIndex];
for (int pos = currentPwmValue; pos != targetPwmValue; pos += stepSize) {
pwm.setPWM(servoChannels[servoIndex], 0, pos);
delay(stepDelay);
}
currentServoPositions[servoIndex] = targetPwmValue;
}
- Smoothly moves servos to the desired position using PWM signals.
- Gradual movement avoids abrupt actions that could damage the servo.
9. Pose Handling
void saveCurrentPose() {
if (configCount < maxConfigurations) {
for (int i = 0; i < numServos; i++) {
savedConfigurations[configCount][i] = currentServoPositions[i];
}
configCount++;
Serial.println("Pose saved.");
}
}
void playNextPose() {
for (int i = 0; i < numServos; i++) {
moveToPositionSmoothly(i, savedConfigurations[currentPoseIndex][i]);
}
delay(1000);
currentPoseIndex++;
}
- Poses (servo positions) can be saved and played back sequentially.
- Supports playback in a loop or one-by-one execution.
Step 6: Developing the OmObiArmControl App for Bluetooth Control
The OmObiArmControl App is a custom-built Android application designed to control the OmObiArm platform wirelessly via Bluetooth. This intuitive app allows users to precisely control the robotic arm, save poses, and manage the movement of the mobile platform. Here’s how the app was developed step by step:
Key Features of the App
الاتصال عبر البلوتوث:
- The app connects to the HC-05 Bluetooth module attached to the robotic platform.
- Users can pair their device and establish a connection via the “Select Device” button.
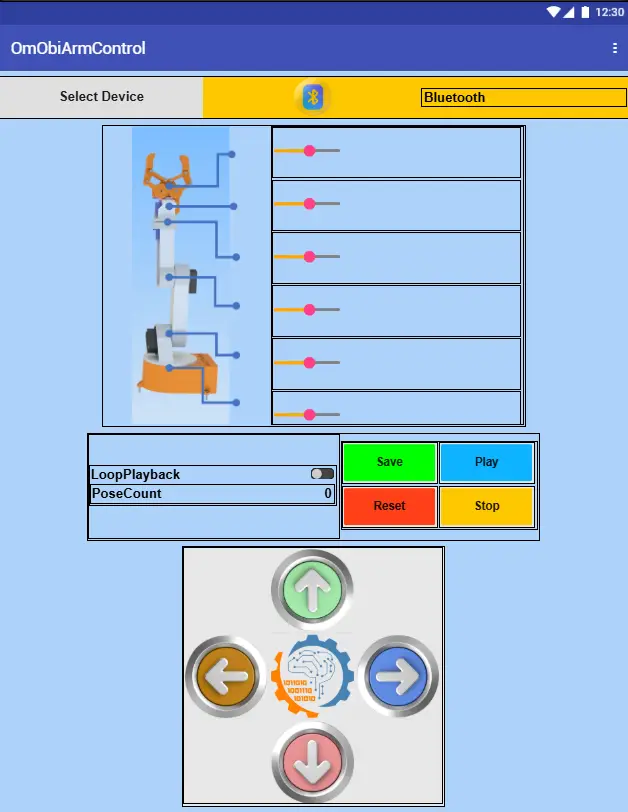
Robotic Arm Control:
- Six sliders control the arm’s joints, from the base to the gripper. Each slider sends position data to the corresponding servo motor in real-time.
- The app ensures smooth and precise movements of the robotic arm.
Mobile Platform Control:
- Four directional buttons (Forward, Backward, Left, Right) manage the movement of the rover.
- A stop button halts all motor actions immediately.
Pose Management:
- “Save” button stores the current arm position as a pose.
- “Play” initiates playback of saved poses, while “Reset” clears all saved configurations.
- A toggle switch enables or disables looped playback.
Feedback Display:
The app shows the connection status and the number of saved poses, ensuring clarity for the user.
Steps to Build the App
1. Bluetooth Connection Setup
- ListPicker Before/After Picking:
- The app scans for available Bluetooth devices and displays them in a list. Once the user selects a device, the app attempts to connect.
- On successful connection, the app updates the interface to indicate a “Connected” status.
2. Arm Joint Control with Sliders
- Six Sliders for Joint Movement:
- Each slider corresponds to one of the six servos of the robotic arm.
- When a slider is adjusted, the app sends the position as a command (e.g.,
1,90\nfor Servo 1 to move to 90°). - This ensures precise manual control over each joint.

3. Rover Movement Control
- Directional Buttons:
- Each button corresponds to a movement direction for the mobile platform.
- Example:
- Forward: Sends
F\nto move the rover forward. - Backward: Sends
B\nto move the rover backward. - Left: Sends
L\n, and Right: SendsR\n.
- Forward: Sends
- The Stop button halts all movement with the
S\ncommand.

4. Pose Management
- Save, Play, Reset, and Loop Playback:
- Save: Captures the current servo positions and sends
v\nto the robot for storage. - Play: Starts playback of stored poses with the
l\ncommand. - Reset: Clears all saved poses with the
r\ncommand. - التشغيل المتكرر: A toggle switch sends
o\nfor enabling loops orf\nto disable them.
- Save: Captures the current servo positions and sends
5. Real-Time Feedback
- The app dynamically updates the number of saved poses and provides visual feedback on Bluetooth connection status.

How It Works
Connecting to the Robot:
- Open the app and click “Select Device.”
- Choose the HC-05 module from the list of available devices.
- Once connected, the status changes to “Connected.”
Controlling the Robotic Arm:
- Use the sliders to move the robotic arm’s joints. Adjustments are sent to the robot in real-time.
Managing Poses:
- Save poses with the “Save” button and play them back with “Play.”
- Enable looping for continuous playback using the toggle switch.
Driving the Rover:
- Use directional buttons to move the rover and the Stop button to halt all actions immediately.
Step 7: Final Calibration and Testing
Connecting to the Robot:
- Open the app and click “Select Device.”
- Choose the HC-05 module from the list of available devices.
- Once connected, the status changes to “Connected.”
Controlling the Robotic Arm:
- Use the sliders to move the robotic arm’s joints. Adjustments are sent to the robot in real-time.
Managing Poses:
- Save poses with the “Save” button and play them back with “Play.”
- Enable looping for continuous playback using the toggle switch.
Driving the Rover:
- Use directional buttons to move the rover and the Stop button to halt all actions immediately.
الخاتمة
The OmObiArm project demonstrates a comprehensive approach to robotics by combining mobility with manipulation, making it ideal for beginners and enthusiasts. The step-by-step guide covered 3D design, assembly, wiring, programming, and app development to achieve a fully functional, Bluetooth-controlled robot. This integration of the robotic arm and mobile platform provides hands-on experience in mechatronics, automation, and software development. In the next project, we plan to equip the OmObiArm with four ultrasonic sensors to enable obstacle avoidance and object detection, allowing the arm to autonomously locate and grasp objects.




Hi OmArTronics plus Team,
Hope all is well with you!
This is Ashley from JLCMC, a sub-brand of JLCPCB. We are dedicated to building a global one-stop-shop service. There are more than thousands of mechanical components to suit different usage scenarios and needs.
We’ve been impressed by your hands-on approach and creative DIY projects, especially your work with robotic arms. Your focus on practical, innovative solutions aligns perfectly with our mission at JLCMC to provide high-quality mechanical components. We believe a collaboration would be mutually beneficial, as your audience’s interest in robotics and automation closely matches the solutions we offer. Partnering with you would allow us to introduce our precision parts to a tech-savvy community eager for smart, efficient technologies.
We would be happy to provide you with our products for your use, if you are interested or if you happen to need to update your components or have any other questions, please feel free to contact us!
Thanks for your time and I’m looking forward to hearing from you!
Best regards,
Ashely