
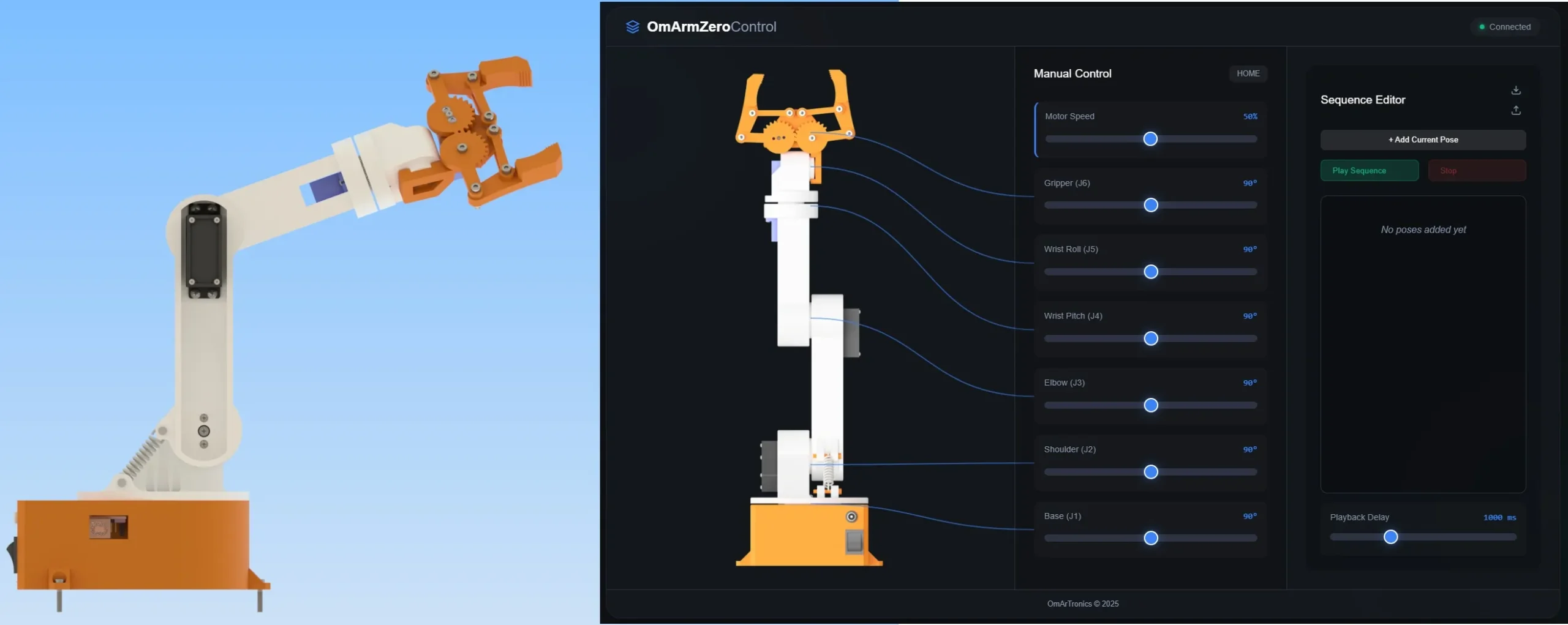
OmArm Zero: 6-DOF (5+1 Gripper) ESP32 Robotic Arm – CAD Files, Firmware, Presentation & Build Guide
0,00 €
Complete project package for the OmArm Zero, a 6-DOF (5+1 Gripper) 3D-printed robotic arm with ESP32 web control. Includes all STL files (12 parts), STEP source files, firmware (serial + WiFi), web interface, Fritzing wiring diagrams, video presentation slides, and a printable 70-page PDF build guide.
Description
What’s included
- 12 STL files – All 3D-printable parts, print-ready and pre-oriented
- STEP source files – Full parametric CAD for customization in Fusion 360 / FreeCAD
- Firmware source code – Arduino sketches for serial control and WiFi web control (ESP32 + PCA9685)
- Web interface – HTML/CSS/JS single-page app served from ESP32 LittleFS
- Fritzing wiring diagrams – Complete wiring reference for ESP32, PCA9685, and 6 servos
- PDF build guide – Printable step-by-step assembly and setup instructions (70 pages)
- Video presentation PDF – Project overview slides (OmArm Zero Presentation)
- Bill of Materials (BOM) – Full parts list with quantities, specs, and estimated cost
Specifications
- 6 degrees of freedom — 5 arm joints + 1 gripper (6 actuated joints)
- 303 mm maximum reach
- 141 g rated payload (150 g max)
- 3x MG996R (base, shoulder, elbow) + 3x SG90 (wrist pitch, wrist roll, gripper)
- ESP32 DevKit + PCA9685 PWM driver
- WiFi Access Point control via browser (10.10.10.1)
- USB serial interface for ROS 2 integration
- Total material cost under $50
Requirements
- 3D printer (FDM, PLA or PETG, 0.2 mm layer height)
- Soldering iron for basic wiring
- Arduino IDE 2.x with ESP32 board support
Full build guide available on the OmArm Zero blog post.
Links:
Related products
-
Sale!

DIY 6-DOF Robotic Arm with Bluetooth: Build & Program Guide
Original price was: 14,90 €.0,00 €Current price is: 0,00 €. Add to cart -
Sale!
Advanced Autonomous Robot Car Arduino Mega: Build Guide
Original price was: 9,90 €.0,00 €Current price is: 0,00 €. Add to cart -
Sale!

6-DOF Robotic Arm – DIY 3D Print, Wire & Program Guide
Original price was: 9,90 €.0,00 €Current price is: 0,00 €. Add to cart -
Sale!

OmObi Bluetooth Robot Car: Arduino, HC-05 & Motor Shield
Original price was: 9,90 €.0,00 €Current price is: 0,00 €. Add to cart
Reviews
There are no reviews yet.