
OmArm Zero: 6-DOF (5+1 Gripper) ROS 2 Robotic Arm – URDF, MoveIt 2, Computer Vision, Presentation & Tutorial Guide
0,00 €
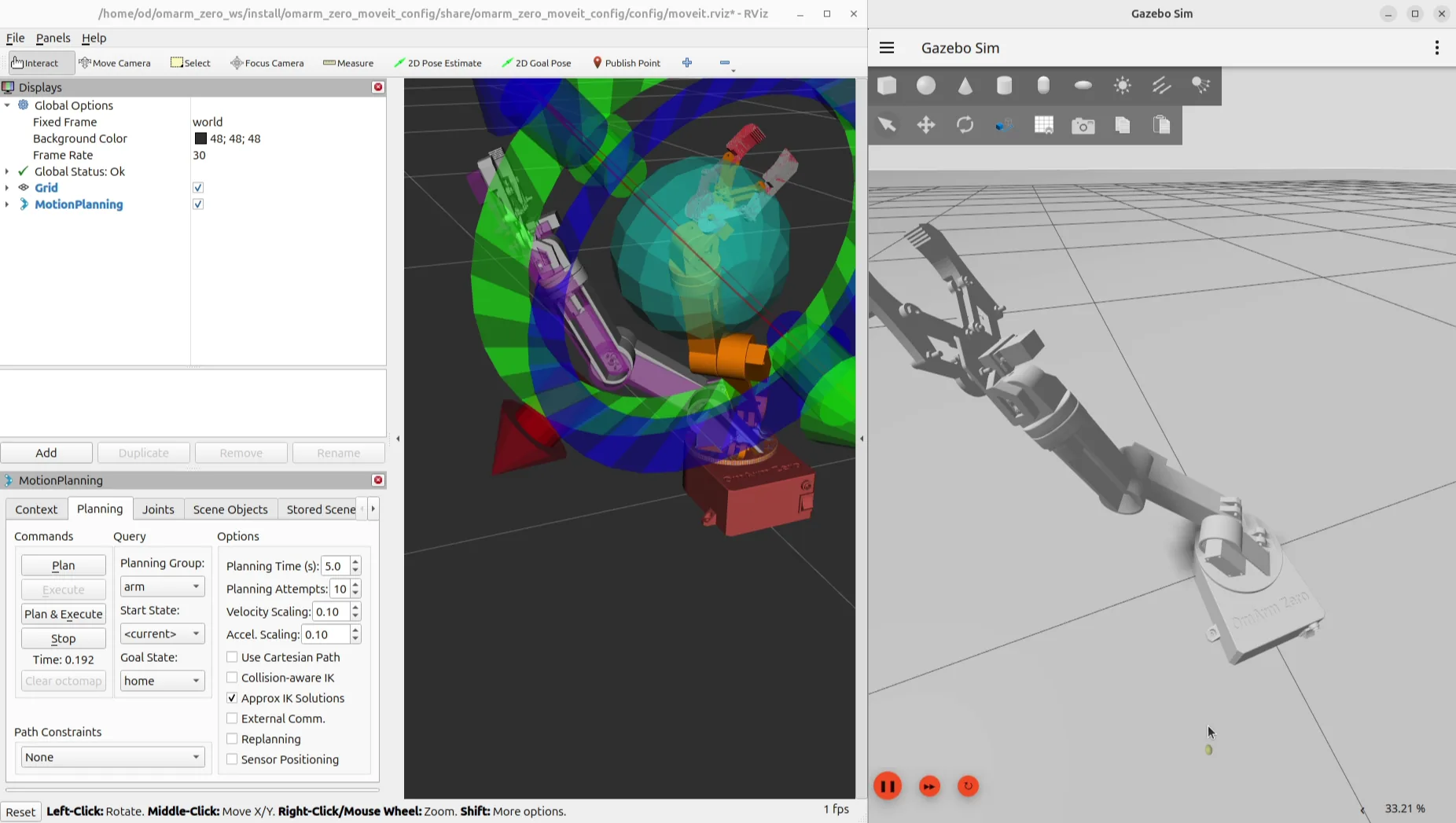
Complete ROS 2 workspace for the OmArm Zero, a 6-DOF (5+1 Gripper) 3D-printed robotic arm. Includes all four ROS 2 packages (URDF, MoveIt 2, Gamepad Control, ESP32 Hardware Bridge), step-by-step PDF guides for Parts 2-4, video presentation slides, and a Fusion 360 URDF exporter plugin. Extract, build, launch.
الوصف
Complete ROS 2 Workspace for the OmArm Zero
Everything you need to simulate, control, and operate the OmArm Zero 6-DOF robotic arm with ROS 2 Jazzy. Download, extract, build — and you’re running.
ما هو مدرج
- omarm_zero_description — Full URDF/Xacro robot model, STL meshes, RViz and Gazebo launch files, ros2_control configs (Part 2)
- omarm_zero_moveit_config — MoveIt 2 setup: motion planning, collision checking, drag-and-drop control in RViz (Part 3)
- omarm_zero_gamepad_control — Gamepad teleoperation: map any USB/Bluetooth controller to joint commands (Part 3)
- omarm_zero_real_control — ESP32 WiFi hardware bridge: control real servos from ROS 2 (Part 4)
- Fusion 360 URDF Exporter — Python plugin to export your own robot from Fusion 360 to ROS 2
- أدلة PDF — Step-by-step build guides for Parts 2, 3, and 4
- Presentation Slides — PPTX slides from the YouTube video series
- README — Quick-start: extract, colcon build, source, launch
متطلبات
- Ubuntu 22.04
- ROS 2 Jazzy
- Gazebo Harmonic
- OmArm Zero hardware (for Part 4 — simulation works without it)
Quick Start
- Download and extract the ZIP
cd ~/omarm_zero_ws && colcon buildsource install/setup.bashros2 launch omarm_zero_description display.launch.py
License
ROS 2 source code: MIT License. Documentation and presentations: © 2026 OmArTronics, personal use only.
Need the hardware too? Check out Part 1: CAD Files, Firmware & Build Guide.
منتجات ذات صلة
-
تخفيض!

OmObiArm: ذراع روبوت متنقل مع Arduino وBluetooth
السعر الأصلي هو: 19,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة -
تخفيض!
سيارة روبوت مستقلة متقدمة Arduino Mega: دليل البناء
السعر الأصلي هو: 9,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة -
تخفيض!

DIY 6-DOF ذراع آلي مع بلوتوث: دليل البناء والبرنامج
السعر الأصلي هو: 14,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة -
تخفيض!

سيارة روبوت أوموبي بلوتوث: أردوينو، HC-05 وموتور شيلد
السعر الأصلي هو: 9,90 €.0,00 €السعر الحالي هو: 0,00 €. إضافة إلى السلة
المراجعات
لا توجد مراجعات بعد.