
ملخص سريع
كيف يعمل حساس المسافة بالموجات فوق الصوتية HC-SR04 وكيفية توصيله بالاردوينو. يغطي مبدأ قياس صدى الزناد، ومخططات الأسلاك، ورمز Arduino باستخدام كل من PulseIn () ومكتبة NewPing، ويوضح كيفية عرض قراءات المسافة على الشاشة التسلسلية. المدى: من 2 سم إلى 400 سم.
من المحتمل أن يكون HC-SR04 هو أول مستشعر للمسافة يستخدمه معظم الأشخاص مع Arduino، وذلك لسبب وجيه - فهو رخيص الثمن وسهل التوصيل ويعمل بشكل جيد بما يكفي لمعظم مشاريع الهوايات. فهو يقيس المسافة باستخدام الموجات الصوتية فوق الصوتية، لذلك ليس هناك حاجة للاتصال الجسدي. يرشدك هذا البرنامج التعليمي إلى كيفية عمل HC-SR04 فعليًا، وكيفية توصيله، وكيفية كتابة كود Arduino، وكيفية إظهار قراءات المسافة على الشاشة التسلسلية وشاشة I2C LCD الاختيارية. في النهاية، يجب أن تكون مرتاحًا بما يكفي لإسقاط هذا المستشعر في أي شيء تقوم ببنائه بعد ذلك.

ما يغطي هذا البرنامج التعليمي
إليك ما ستتعلمه:
- كيف يعمل استشعار المسافة بالموجات فوق الصوتية، بما في ذلك مبدأ زمن الرحلة وصيغة المسافة.
- قم بتوصيل HC-SR04 إلى Arduino Uno باستخدام اللوح وأسلاك التوصيل.
- كتابة وتحميل كود الاردوينو الذي يقرأ المسافة ويطبعه على الشاشة التسلسلية.
- توصيل شاشة I2C LCD بشكل اختياري لإظهار قراءات المسافة بدون جهاز كمبيوتر.
- استكشاف المشكلات الشائعة وإصلاحها مثل القراءات الخاطئة والقيم الصفرية وأخطاء الأسلاك.
- حدود الاستشعار بالموجات فوق الصوتية وكيفية الحصول على أفضل دقة.
كيفية عمل استشعار المسافة بالموجات فوق الصوتية
يقوم جهاز استشعار بالموجات فوق الصوتية بقياس المسافة عن طريق إرسال دفعة قصيرة من الصوت عالي التردد والاستماع إلى الصدى الذي يرتد. في الواقع، إنها نفس فكرة تحديد الموقع بالصدى في الخفافيش. يحتوي HC-SR04 على محولي طاقة أسطوانيين على وجهه الأمامي: جهاز الإرسال (الذي يحمل علامة T) وجهاز الاستقبال (الذي يحمل علامة R).
مبدأ زمن الرحلة
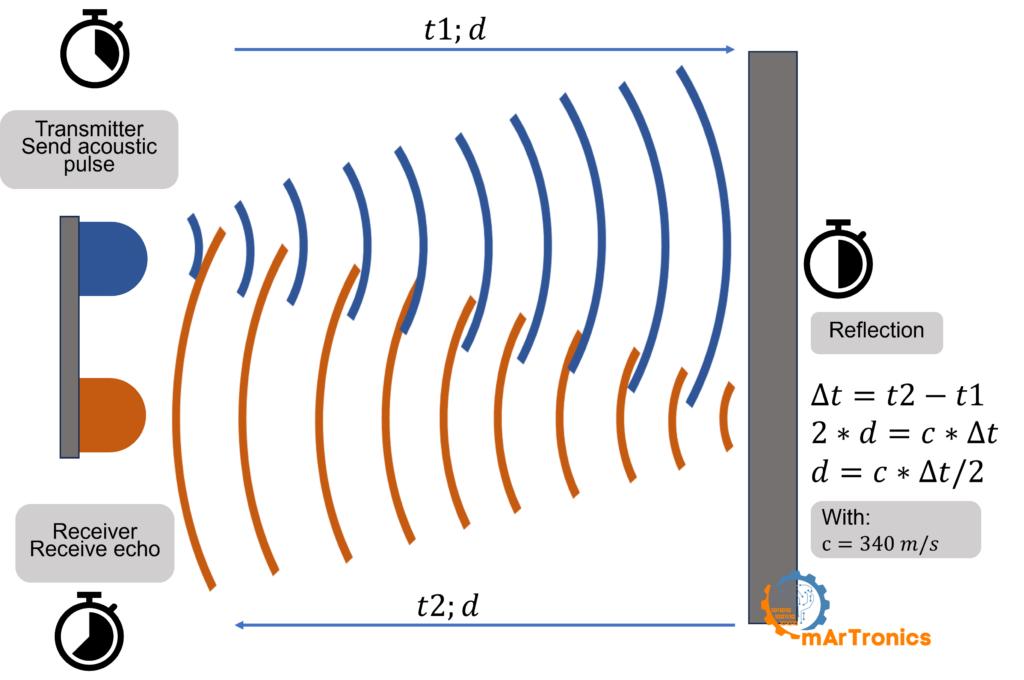
عندما تقوم بتشغيل المستشعر، يرسل جهاز الإرسال دفعة من النبضات فوق الصوتية بسرعة حوالي 40 كيلو هرتز، وهو أعلى بكثير من نطاق السمع البشري. تنتقل هذه الموجات الصوتية إلى الخارج بنمط مخروطي الشكل. عندما تصطدم بجسم صلب، فإنها ترتد نحو المستشعر، ويلتقطها جهاز الاستقبال كصدى. يقوم المستشعر بعد ذلك بقياس الوقت الإجمالي بين إرسال النبض واستعادة الصدى. وهذا ما يسمى وقت الرحلة.
معادلة المسافة
ولأن الصوت ينتقل إلى الجسم ويعود، فإنه يغطي المسافة مرتين. للحصول على المسافة في اتجاه واحد، يمكنك استخدام هذه الصيغة:
المسافة = (الزمن × سرعة الصوت) / 2
في درجة حرارة الغرفة (حوالي 20 درجة مئوية)، ينتقل الصوت بسرعة حوالي 343 مترًا في الثانية، أو 0.0343 سم في ميكروثانية. نظرًا لأن Arduino يقيس وقت الصدى بالميكروثانية، فإن الصيغة التي ستستخدمها في الكود هي:
المسافة (سم) = المدة (بالولايات المتحدة) × 0.0343 / 2
إن القسمة على 2 مهمة لأن الموجة الصوتية تقوم برحلة ذهابًا وإيابًا. إذا تخطيتها، فستحصل على ضعف المسافة الحقيقية. تتغير سرعة الصوت أيضًا قليلًا مع درجة الحرارة والرطوبة، لذلك قد تنحرف القراءات بضعة ملليمترات في الظروف القاسية.
رسوم متحركة تفاعلية: كيف يعمل الاستشعار بالموجات فوق الصوتية
انقر فوق إرسال بينغ وسحب مسافة العوائق شريط التمرير لمعرفة كيف يقيس HC-SR04 المسافة في الوقت الفعلي.
مواصفات HC-SR04
قبل توصيل أي شيء، إليك أولاً المواصفات التي يجب أن تعرفها عن HC-SR04.
| المعلمة | القيمة |
|---|---|
| جهد التشغيل | 5 فولت تيار مستمر |
| تيار التشغيل | 15 مللي أمبير |
| نطاق القياس | 2 سم إلى 400 سم |
| قياس الزاوية | 15 درجة تقريباً |
| التردد فوق الصوتي | 40 كيلوهرتز |
| عرض نبضة الزناد | 10 دولارات أمريكية كحد أدنى |
| الدقة | حوالي +/- 3 مم |
| دبابيس الواجهة | VCC، تريج، صدى الصوت، GND |
المكونات المطلوبة
للبدء، قم بجمع الأجزاء المذكورة أدناه. تعد شاشة LCD والمحول الخاص بها اختياريين — ولن تحتاج إلا إلى تلك الخاصة بقسم ترقية الشاشة لاحقًا.
| المكوّن | الغرض | هل هذا مطلوب؟ | الملاحظات |
|---|---|---|---|
| أردوينو أونو | لوحة التحكم الدقيقة التي تقوم بتشغيل الكود وقراءة بيانات المستشعر | نعم | تعمل أي لوحة متوافقة مع Arduino. اعرف المزيد عن اردوينو |
| جهاز الاستشعار بالموجات فوق الصوتية HC-SR04 | يقيس المسافة باستخدام الموجات الصوتية فوق الصوتية | نعم | وحدة رباعية السنون: VCC، تريج، صدى الصوت، GND |
| اللوح | يوفر منصة بدون لحام لإجراء التوصيلات | نعم | تكفي لوحة خبز بنصف الحجم |
| أسلاك التوصيل (ذكر إلى ذكر) | توصيل المستشعر بالأردوينو من خلال اللوح | نعم | يلزم وجود 4 أسلاك على الأقل |
| كابل USB (من النوع A إلى B) | توصيل الأردوينو بجهاز الكمبيوتر الخاص بك لتحميل التعليمات البرمجية والإخراج التسلسلي | نعم | مرفق مع معظم أطقم Arduino |
| HD44780 16&215;2 LCD مع محول I2C | يعرض قراءات المسافة دون الحاجة إلى كمبيوتر | اختياري | مطلوب فقط لقسم ترقية LCD |
توصيل الأسلاك HC-SR04 بـ Arduino
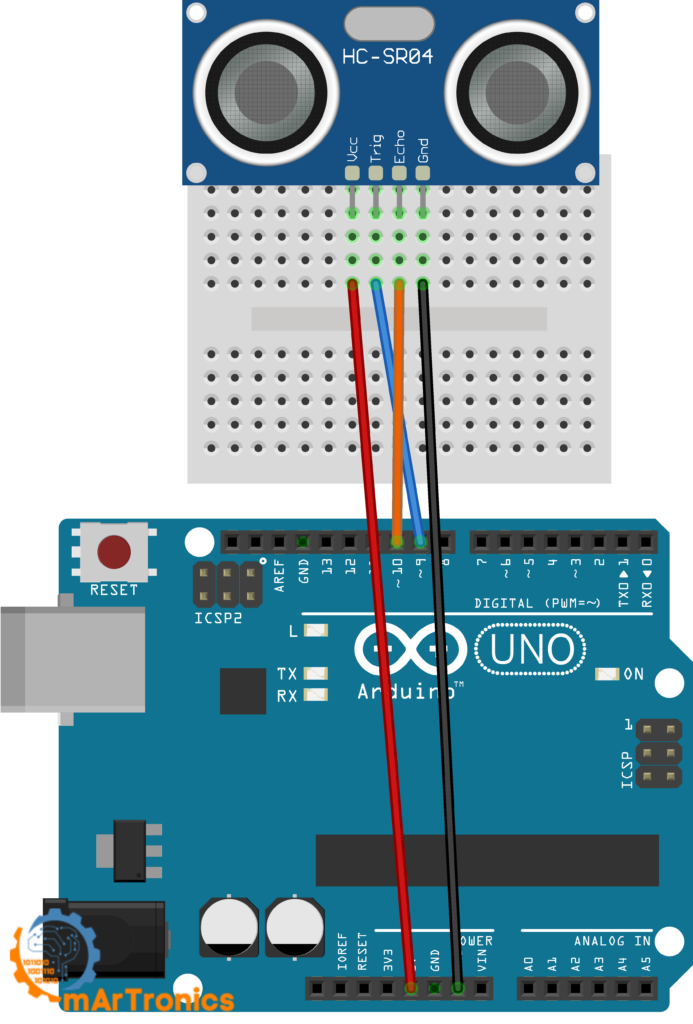
توصيل HC-SR04 بـ أردوينو هو واضح ومباشر. يحتوي المستشعر على أربعة منافذ، وكل واحد منها يتصل مباشرة بالاردوينو. استخدم جدول الأسلاك أدناه وتأكد أيضًا من تثبيت كل شيء بثبات على لوحة التجارب قبل تحميل أي رمز.
| دبوس HC-SR04 | دبوس الأردوينو | الوصف |
|---|---|---|
| VCC | 5V | تشغيل المستشعر (يجب أن يكون 5 فولت) |
| المثلثات | دبوس رقمي 9 | يستقبل إشارة الزناد من الأردوينو |
| الصدى | دبوس رقمي 10 | يرسل نبضة الصدى إلى الأردوينو |
| GND | GND | أرضية مشتركة (يجب أن تكون مشتركة مع Arduino GND) |
مهم: يجب أن يتشارك Arduino وHC-SR04 في أرضية مشتركة. إذا نسيت GND، فلن يعطيك المستشعر أي قراءات. تحقق مرة أخرى من هذا الاتصال إذا رأيت 0 سم أو لم يكن هناك أي إخراج.
كود مستشعر أردوينو بالموجات فوق الصوتية
بعد الانتهاء من توصيل الأسلاك، قم بتحميل هذا المخطط إلى Arduino الخاص بك. يقوم بتشغيل HC-SR04، ويقرأ وقت الصدى، ويحسب المسافة بالسنتيمتر، ويطبع النتيجة على الشاشة التسلسلية. هل أنت جديد في كود اردوينو؟ ملكنا دليل أساسيات برمجة الأردوينو يغطي إعداد IDE وهيكل الرسم.
/**
* Author: Omar Draidrya
* Date: 2024/05/07
* This code measures distance using an ultrasonic sensor
* and outputs the result via serial communication.
*/
#define TRIG_PIN 9 // Trigger pin of the ultrasonic sensor
#define ECHO_PIN 10 // Echo pin of the ultrasonic sensor
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(9600);
}
void loop() {
long duration, distance;
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
duration = pulseIn(ECHO_PIN, HIGH);
distance = duration * 0.034 / 2;
Serial.print("Distance (cm): ");
Serial.println(distance);
delay(1000);
}
شرح الكود: سطر بسطر
يوجد أدناه تفصيل لما يفعله كل جزء من التعليمات البرمجية، حتى تتمكن من تعديله لاحقًا أو تعقب الأخطاء.
#تعريف TRIG_PIN 9 و ECHO_PIN 10 إعطاء أسماء يمكن قراءتها بواسطة الإنسان لأرقام التعريف الشخصية الرقمية. بمعنى آخر، يتحكم السن 9 في المشغل، ويستمع السن 10 إلى الصدى. يمكنك تغييرها إلى أي دبابيس رقمية متاحة، طالما قمت أيضًا بتحديث الأسلاك.
pinMode(TRIG_PIN, OUTPUT) يعين دبوس 9 كمخرج. وذلك لأن Arduino يحتاج إلى إرسال إشارة إلى المستشعر لبدء القياس.
pinMode(ECHO_PIN, INPUT) يعين دبوس 10 كمدخل. وذلك لأن Arduino يحتاج إلى استقبال إشارة الصدى القادمة من المستشعر.
Serial.begin(9600) يفتح الاتصال التسلسلي عند 9600 باود حتى يتمكن Arduino من إرسال قراءات المسافة إلى جهاز الكمبيوتر الخاص بك. افتح Serial Monitor في Arduino IDE (الأدوات ثم Serial Monitor) لرؤيتها.
تسلسل الزناد يسحب Arduino دبوس الزناد إلى الأسفل، وينتظر 2 ميكروثانية لبداية نظيفة، ويسحبه إلى الأعلى لمدة 10 ميكروثانية بالضبط، ثم يسقطه إلى الأسفل مرة أخرى. يخبر هذا النبض العالي الذي تبلغ مدته 10 ميكروثانية جهاز HC-SR04 بإطلاق انفجاره بالموجات فوق الصوتية.
قراءة الصدى وحساب المسافة
نبض في(ECHO_PIN، مرتفع) هي وظيفة Arduino مدمجة تنتظر ارتفاع دبوس الصدى، ثم تقيس المدة التي يظل فيها مرتفعًا (بالميكروثانية). هذه المدة هي وقت الرحلة ذهابًا وإيابًا للموجة الصوتية. في حالة عدم عودة الصدى خلال ثانية واحدة تقريبًا، يُرجعpulseIn القيمة 0.
المسافة = المدة * 0.034 / 2 يحول وقت الصدى إلى مسافة بالسنتيمتر. هنا، 0.034 هي سرعة الصوت بالسنتيمتر لكل ميكروثانية (تحويل 343 م/ث). القسمة على حسابين لرحلة الذهاب والإياب.
Serial.println(distance) ثم يطبع المسافة متبوعة بخط جديد، بحيث تظهر كل قراءة على صف خاص بها في الشاشة التسلسلية.
تأخير (1000) يتوقف مؤقتًا لمدة ثانية واحدة قبل القياس التالي. يمكنك خفض ذلك للحصول على تحديثات أسرع، ولكن يجب عليك الحفاظ على 30 مللي ثانية على الأقل بين القراءات حتى يتمكن المستشعر من الاستقرار وعدم تداخل الأصداء القديمة.
الاختبار باستخدام الشاشة التسلسلية
بعد التحميل، افتح Serial Monitor (Ctrl+Shift+M، أو Tools ثم Serial Monitor). ثم اضبط معدل الباود على 9600 في الزاوية اليمنى السفلية. قم بتوجيه المستشعر نحو سطح مستو مثل جدار أو كتاب وحركه ببطء أقرب وأبعد. يجب أن تشاهد تحديث المسافة كل ثانية. إذا حصلت على 0 أو أرقام تقفز بشدة، فراجع قسم الأسلاك وقسم استكشاف الأخطاء وإصلاحها أدناه.
ترقية اختيارية: عرض المسافة على شاشة I2C LCD
إذا كان إصدار Serial Monitor يعمل، فيمكنك المضي قدمًا إلى الأمام عن طريق إضافة شاشة LCD HD44780 16×2 مع محول تسلسلي I2C. ونتيجة لذلك، يمكن لـ Arduino الخاص بك عرض قراءات المسافة على شاشة فعلية، لذلك لن تحتاج إلى توصيل جهاز كمبيوتر بعد الآن. هذا القسم اختياري ويعتمد على نفس الأسلاك من القسم السابق.
جدول أسلاك LCD
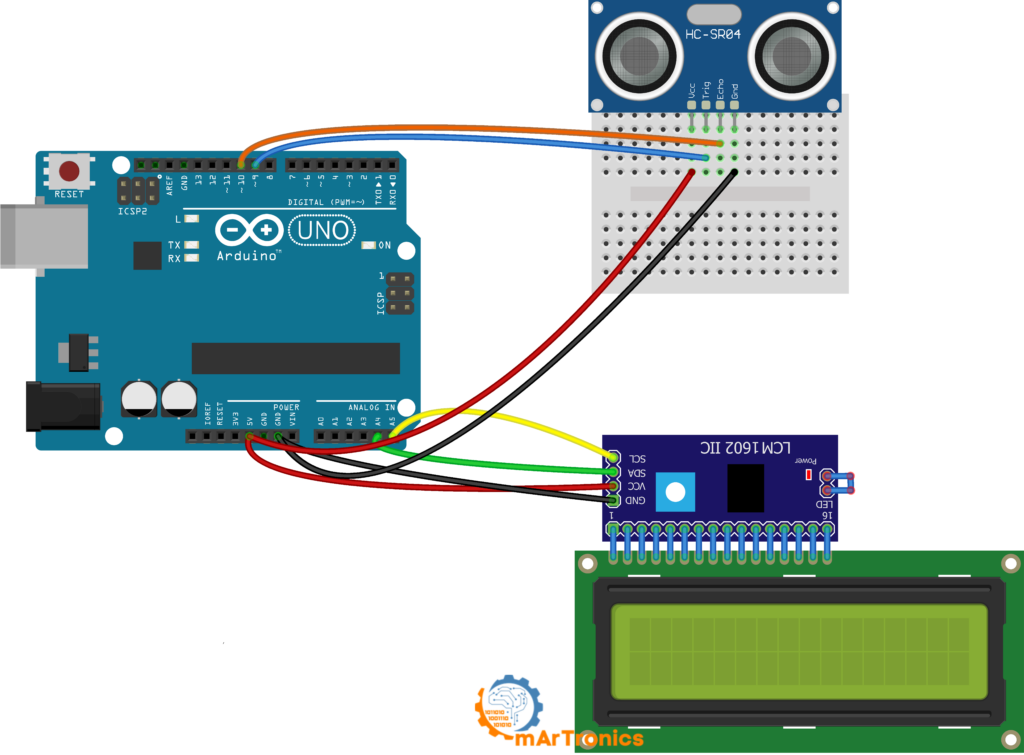
أبقِ HC-SR04 متصلاً كما كان من قبل (Trig on pin 9، Echo on pin 10، VCC to 5 V، GND to GND). ثم أضف اتصالات LCD أدناه.
| دبوس I2C LCD | دبوس الأردوينو | الوصف |
|---|---|---|
| VCC | 5V | تشغيل وحدة LCD |
| GND | GND | أرضية مشتركة |
| SDA | A4 | خط بيانات I2C |
| SCL | A5 | خط الساعة I2C |
ملاحظة على عناوين I2C: معظم وحدات I2C LCD تستخدم العنوان الافتراضي 0x27، لكن بعضها يستخدم 0x3F. إذا ظلت شاشة LCD فارغة بعد التحميل، فحاول أولاً تغيير العنوان في الكود، أو قم بدلاً من ذلك بتشغيل رسم ماسح ضوئي I2C للعثور على العنوان الصحيح.
كود LCD Arduino مع مكتبة نيو بينغ
يستخدم هذا المخطط مكتبتين: نيو بينج لقراءات أجهزة الاستشعار بالموجات فوق الصوتية و LiquidCrystal_I2C للتحكم في شاشات الكريستال السائل عبر I2C. قم أولاً بتثبيت كليهما من خلال Arduino Library Manager (ارسم ثم قم بتضمين المكتبة ثم إدارة المكتبات) قبل التحميل. يتعامل NewPing مع توقيت الزناد والصدى نيابةً عنك، لذلك لا تحتاج إلى كتابة رمز النبض منخفض المستوى بنفسك. كما أن لديها تصفية مدمجة للضوضاء وإدارة المهلة.
/**
* Author: Omar Draidrya
* Date: 2024/05/07
* This code measures distance using an ultrasonic sensor
* and displays the result on an LCD.
*/
#include <LiquidCrystal_I2C.h>
#include <NewPing.h>
#define TRIGGER_PIN 9
#define ECHO_PIN 10
#define MAX_DISTANCE 200
LiquidCrystal_I2C lcd(0x27, 16, 2);
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
lcd.init();
lcd.backlight();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Distance:");
}
void loop() {
delay(50);
int distance = sonar.ping_cm();
lcd.setCursor(0, 1);
if (distance > 0) {
lcd.print(distance);
lcd.print(" cm ");
} else {
lcd.print("Out of range ");
}
}
يعد محول I2C رائعًا لأنه يقلل من عدد الأسلاك مقارنة بتشغيل شاشة LCD في الوضع المتوازي، كما أنه يحرر المسامير الرقمية لأجهزة الاستشعار أو المحركات الأخرى. إذا كنت تريد مشروعًا آخر يستخدم شاشة I2C LCD، فاطلع على موقعنا مشروع قفل الباب بكلمة مرور أردوينو.
الدقة، والقيود، وأفضل الممارسات
يعمل HC-SR04 بشكل جيد مع الهوايات والمشروعات التعليمية، ولكن له حدود مادية مهمة. معرفة هذه الأمور سيوفر عليك من القراءات المربكة.
الحد الأدنى للمدى (المنطقة العمياء): لا يستطيع HC-SR04 قياس الأجسام الأقرب من 2 سم تقريبًا. عند تلك المسافة، يتداخل النبض الصادر مع الصدى العائد، ولا يستطيع المستقبل التمييز بينهما.
الأسطح الناعمة والزاوية: تعكس الموجات فوق الصوتية أفضل الأسطح الصلبة والمسطحة التي تواجه المستشعر وجهاً لوجه. على سبيل المثال، تمتص المواد الناعمة مثل القماش أو الرغوة أو الفراء الكثير من الطاقة الصوتية. يمكن للأسطح المنحنية أو المائلة أن تصرف الصدى بعيدًا عن جهاز الاستقبال تمامًا.
مخروط الكشف الضيق: بالإضافة إلى ذلك، يتمتع HC-SR04 بزاوية قياس تبلغ حوالي 15 درجة فقط. وبالتالي، لن يتم اكتشاف أي شيء خارج هذا المخروط، لذا ضع ذلك في الاعتبار عند تركيب المستشعر.
العوامل البيئية: تتغير سرعة الصوت مع تغير درجة حرارة الهواء والرطوبة. على سبيل المثال، عند 0 درجة مئوية، ينتقل الصوت بسرعة حوالي 331 م/ث، بينما عند 30 درجة مئوية، فهو أقرب إلى 349 م/ث. بالنسبة لمعظم المشاريع الداخلية في درجة حرارة الغرفة، فإن 343 م/ث قريبة بما فيه الكفاية.
قراءات صاخبة أو قافزة: يمكن أن تتسبب الأصداء الضالة أو الأجسام القريبة أو الضوضاء الكهربائية في حدوث ارتفاعات أو انخفاضات عرضية. ولهذا السبب، الحل العملي هو أخذ قراءات متعددة وحساب متوسطها.
ارتفاع التركيب والمحاذاة: قم بتركيب المستشعر بحيث تواجه محولاته المنطقة المستهدفة مباشرة. ولهذا السبب، حتى الميل الطفيف يمكن أن يتسبب في تفويت الصدى لجهاز الاستقبال. على الروبوتات المتنقلة، تأكد من تثبيت المستشعر بشكل ثابت وعدم اهتزازه أثناء الحركة.
استكشاف المشاكل الشائعة في HC-SR04 وإصلاحها
إذا لم يقدم لك المستشعر النتائج التي تتوقعها، فراجع هذه المشكلات الشائعة قبل افتراض أن الجهاز تالف.
القراءة دائماً 0 سم: هذا يعني عادةً أن دبوس الصدى لا يتلقى إشارة. أولاً، تأكد من أن سلك الصدى يذهب إلى الدبوس الصحيح (دبوس 10 في هذا البرنامج التعليمي). ثم تحقق من أن المستشعر GND متصل بـ Arduino GND.
قراءة المسافة القصوى دائماً: إذا استمر المستشعر في إعادة قيمته القصوى، فمن المحتمل أن الصدى يضيع. يحدث هذا غالبًا عندما يواجه المستشعر مساحة مفتوحة لا يوجد شيء في نطاقها، أو عندما يمتص السطح المستهدف الصوت أو يحرفه.
قيم القفز العشوائي: في معظم الحالات، تأتي القراءات غير المستقرة من الأسلاك غير المستقرة، أو اتصالات لوحة التجارب السيئة، أو التداخل من مصادر الموجات فوق الصوتية الأخرى. لإصلاح ذلك، اضغط على جميع الأسلاك بقوة في اللوح. إذا استمرت القراءات في القفز، فحاول إضافة تأخير بسيط بين القياسات أو حساب متوسط قراءات متعددة.
مشكلات الكود والتهيئة
لا يوجد إخراج تسلسلي على الإطلاق: تأكد من تحديد اللوحة والمنفذ الصحيحين في Arduino IDE ضمن الأدوات، ومن أن معدل الباود للمراقبة التسلسلية يطابق القيمة الموجودة في الكود الخاص بك (9600).
تعيين دبوس خاطئ في التعليمات البرمجية: إذا قمت بتوصيل Trig وEcho إلى أطراف مختلفة عن 9 و10، فقم بتحديث خطوط #define في الجزء العلوي من الرسم لتتناسب.
طاقة غير كافية أو أسلاك مفكوكة: يحتاج HC-SR04 إلى مصدر ثابت بجهد 5 فولت. على سبيل المثال، إذا كنت تقوم بتشغيل العديد من المكونات من طرف Arduino 5V، فقد ينخفض الجهد الكهربي عن ما يحتاجه المستشعر.
شاشة LCD لا تعرض النص: إذا ظلت الشاشة فارغة بعد الانتهاء من قسم LCD، فتحقق من عنوان I2C أولاً. جرب 0x3F بدلاً من 0x27 في الكود. تأكد أيضًا من توصيل SDA بـ A4 وSCL بـ A5. قم أيضًا بضبط مقياس جهد التباين الموجود في الجزء الخلفي من محول I2C.
الأسئلة الشائعة (FAQ)
يمكن لجهاز HC-SR04 قياس مسافات تصل إلى 400 سم (4 أمتار) تقريبًا. ومع ذلك، في الممارسة العملية، تميل القراءات التي تزيد عن 200 إلى 300 سم إلى أن تصبح أقل موثوقية، خاصة في البيئات ذات الأصداء المتنافسة أو الأسطح المستهدفة الناعمة.
صممت الشركة المصنعة HC-SR04 لتشغيل 5 فولت. يخرج دبوس الصدى 5 فولت، مما قد يؤدي إلى تلف لوحات 3.3 فولت. استخدم مقسِّم جهد على دبوس الصدى أو اختر متغير HC-SR04P الذي يدعم التشغيل من 3.3 فولت إلى 5 فولت.
عادة ما تعني القراءة 0 سم أن المستشعر لم يتلق صدى. الأسباب الأكثر شيوعًا هي فقدان اتصال GND، أو دبوس الصدى الخاطئ في الكود، أو كون الكائن قريبًا جدًا (أقل من 2 سم).
تبلغ دقة HC-SR04 حوالي زائد أو ناقص 3 مم في الظروف المثالية. ومع ذلك، في الاستخدام الواقعي، توقع دقة تزيد أو تنقص 1 سم تقريبًا حسب السطح المستهدف والبيئة.
نعم، يمكنك توصيل مستشعرات HC-SR04 متعددة بمستشعرات HC-SR04 بدبابيس رقمية مختلفة على Arduino. ومع ذلك، قم بتشغيلها واحدًا تلو الآخر مع تأخير قصير بين القراءات لمنع التداخل الصوتي.
NewPing هي مكتبة مفتوحة المصدر تتعامل مع توقيت التشغيل والصدى نيابةً عنك، وتدعم أجهزة استشعار متعددة، وتتضمن تصفية المهلة والوسيط.
خذ قراءات متعددة وقم بمتوسطها. يحتوي NewPing على مرشح متوسط مدمج (ping_median()) يعالج هذا تلقائيًا.
تشمل المشاريع الشائعة الروبوتات التي تتجنب العوائق، والرادار بالموجات فوق الصوتية، وأجهزة استشعار وقوف السيارات، وأجهزة مراقبة مستوى السائل، وأنظمة الأمان.
لا. إن HC-SR04 ليس مقاومًا للماء. للاستخدام تحت الماء، تحتاج إلى محول طاقة بالموجات فوق الصوتية مخصص للماء.
يعمل HC-SR04P على 3.3 فولت إلى 5 فولت، لذا يمكنك استخدامه مع لوحات 3.3 فولت مثل ESP32 بدون ناقل المستوى. يحتاج HC-SR04 القياسي إلى 5 فولت.
ماذا نبني بعد ذلك
كخطوة تالية، حاول تركيب المستشعر على محرك سيرفو وبناء جهاز رادار أردوينو بالموجات فوق الصوتية التي تجتاح وترسم خرائط للمنطقة المحيطة بها. أو يمكنك إسقاطه في سيارة روبوت تتفادى العقبات الذي يقود حول الأشياء من تلقاء نفسه. إذا لم تكن قد عملت مع المحركات المؤازرة حتى الآن، فلدينا دليل التحكم المؤازر الأردوينو سوف تحصل على ما يصل إلى السرعة.
الخاتمة
يعد HC-SR04 مستشعرًا رائعًا للمبتدئين لأنه يجمع الأسلاك والتوقيت والإخراج التسلسلي معًا في مشروع صغير واحد. في هذه المرحلة، أنت تعرف كيفية عمل المستشعر، وكيفية توصيله، وكيفية قراءة المسافة في الكود، وكيفية عرض النتائج على الشاشة. إذا حدث خطأ ما، فسيوجهك قسم استكشاف الأخطاء وإصلاحها أعلاه في الاتجاه الصحيح. من هنا، يمكنك توصيل هذا المستشعر بأي شيء تقريبًا. لمزيد من المشاريع والبرامج التعليمية حول Arduino، راجع أومارترونيكس.
رأي واحد حول “Arduino Ultrasonic Distance Sensor: HC-SR04 Tutorial with Wiring and Code”